Dieses Jahr hat Helveticrobot mit 3 Teams am RoboCup Austrian Open teilgenommen. Helvetircrobot konnte sich somit an den Disziplinen Rescue Line, Rescue Maze und die Königsdisziplin Soccer beweisen. Bei der Weltmeisterschaft in Leipzig konnte sich das neu gebildete Team einiges an Wissen und Erfahrung aneignen.
Das Soccer-Team am RoboCup Junior 2016 in Leipzig, Deutschland:
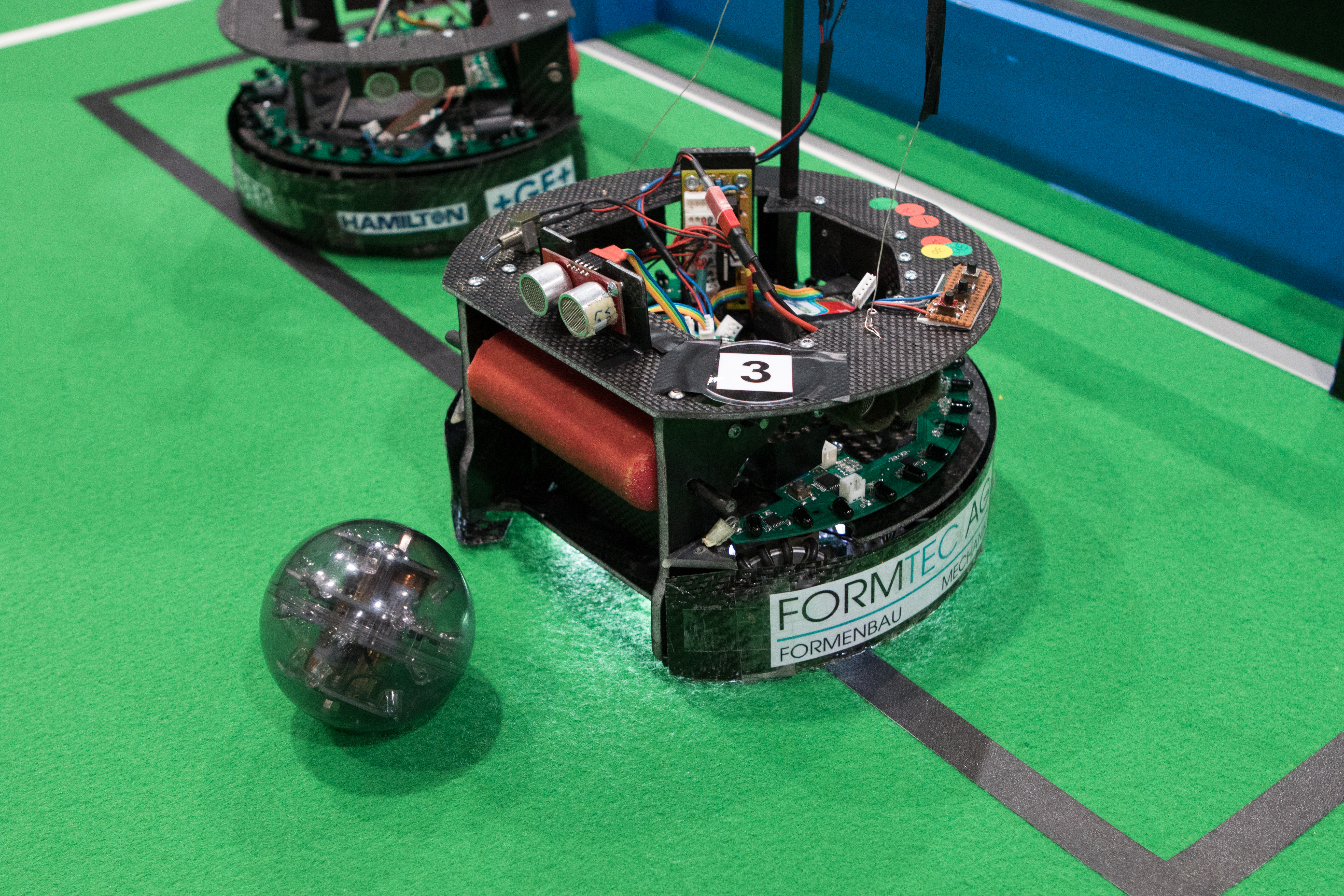
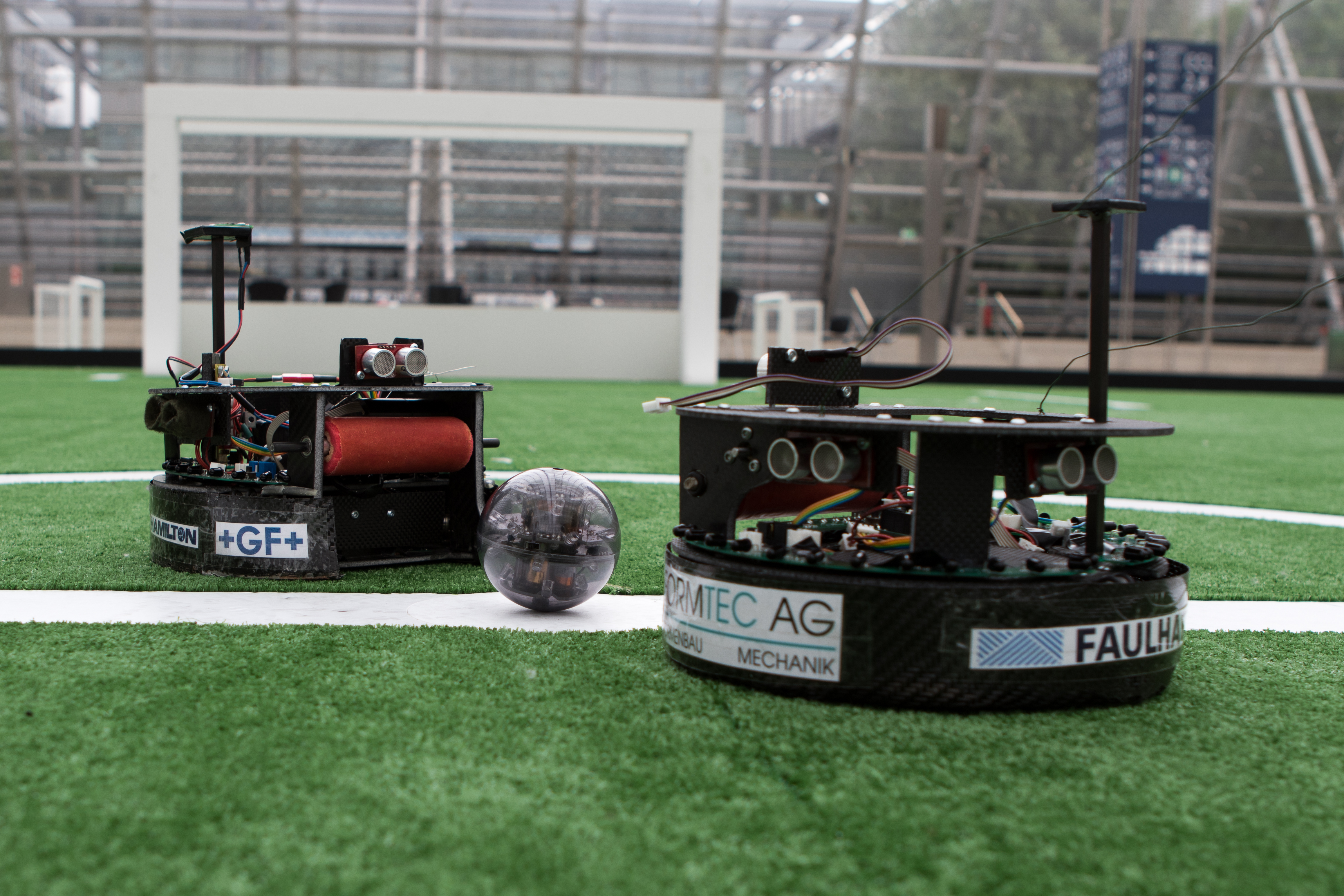
Wie schon in den letzten Jahren,konnten wir auch dieses Jahr wieder in der Disziplin Soccer LightWeight teilnehmen. Dabei sind wir in dieser Kategorie meistens die einzigen Mitspieler, die einen Kicker und einen Dribbler einbauen können. Auch dieses Jahr zogen wir damit die Blicke Neugieriger Konkurrenten auf uns. Trotzdem hatten sie zum Teil viel speziellere Designs und Materialien. Viele Roboter waren dieses Jahr präzise gefräst und sahen sich zum Teil bis auf die Farbe gleich. Gut zu beobachten war, dass ziemlich jedes Team Probleme mit der Elektronik hatte. Was uns junge Tüftler erleichterte.
Während leider die Elektronik sich immer wieder gegen uns stellte, konnten wir angestrengt immer wieder etwas aus den Boards herausholen. Die Kommunikation per SPI und I2C zu den Boards und Sensoren haben durch eine Störung bezüglich eines Pins, welcher die Signalintegrität zunehmend verschlechterte, das Mainboard immer wieder überhitzen lassen. Dadurch mussten wir immer wieder neue Mainboards bestücken. Wir versuchten herauszufinden, weshalb sich die ganze Kommunikation durch diesen Pin aufhing, konnten aber keinen Zusammenhang finden. Für eine kurze Zeitspanne konnten wir jedoch diese Boards nutzen, da das Mainboard dies stand hielt. Leider haben wir dies nicht sofort gemerkt und haben dann diese Zeitspanne für das Ausprobieren genutzt. Somit hatten wir grosse Schwierigkeiten an den ersten Einzelkämpfen, wie auch bei den Team-Spielen. Wir versuchten aus diesem Problem schlau zu werden, fanden jedoch nur heraus, dass an diesem Pin keine Komponenten daran hingen. Welches uns dann noch viel mehr verwirrte.
Dennoch konnten wir sehr viel aus dieser misslichen Situation mitnehmen. Wir konnten viel lernen und haben eine menge an Erfahrung gewonnen. Vor allem auch wie es ist, wenn man gegen die Zeit rennt, da wir immer wieder unter Zeitdruck standen.
Spannend war, dass die Major-League Arena direkt neben, beziehungsweise sogar zum Teil mit der Junior Arena geleget wurde. Dies ermöglichte uns die Aussprache mit den Majors und gab uns neue Ansichten in die Problematik.
Leider ist der RoboCup und unsere Zeit in Deutschland schon zu Ende. Trotzdem sind wir sehr zufrieden. Mit neuen Eindrücken, Erfahrungen und Wissen können wir uns dem nächsten Wettbewerb zuwenden und uns in alte, wie auch neue Herausforderungen stürzen.
Ein herzlicher Dank gebührt unseren Sponsoren, die uns diesen Wettbewerb ermöglicht haben. Speziell zu erwähnen ist dabei unsere Platin-Sponsoren Faulhaber. Vielen Dank!
Die Rescue Teams an den Austrian Open:
Aus Platzgründen des RoboCups konnten wir unser Resce Maze Team nicht an die Weltmeisterschaft mitnehmen. Vielleicht klappt es das nächte Jahr. Wir sehen positiv nach vorn.
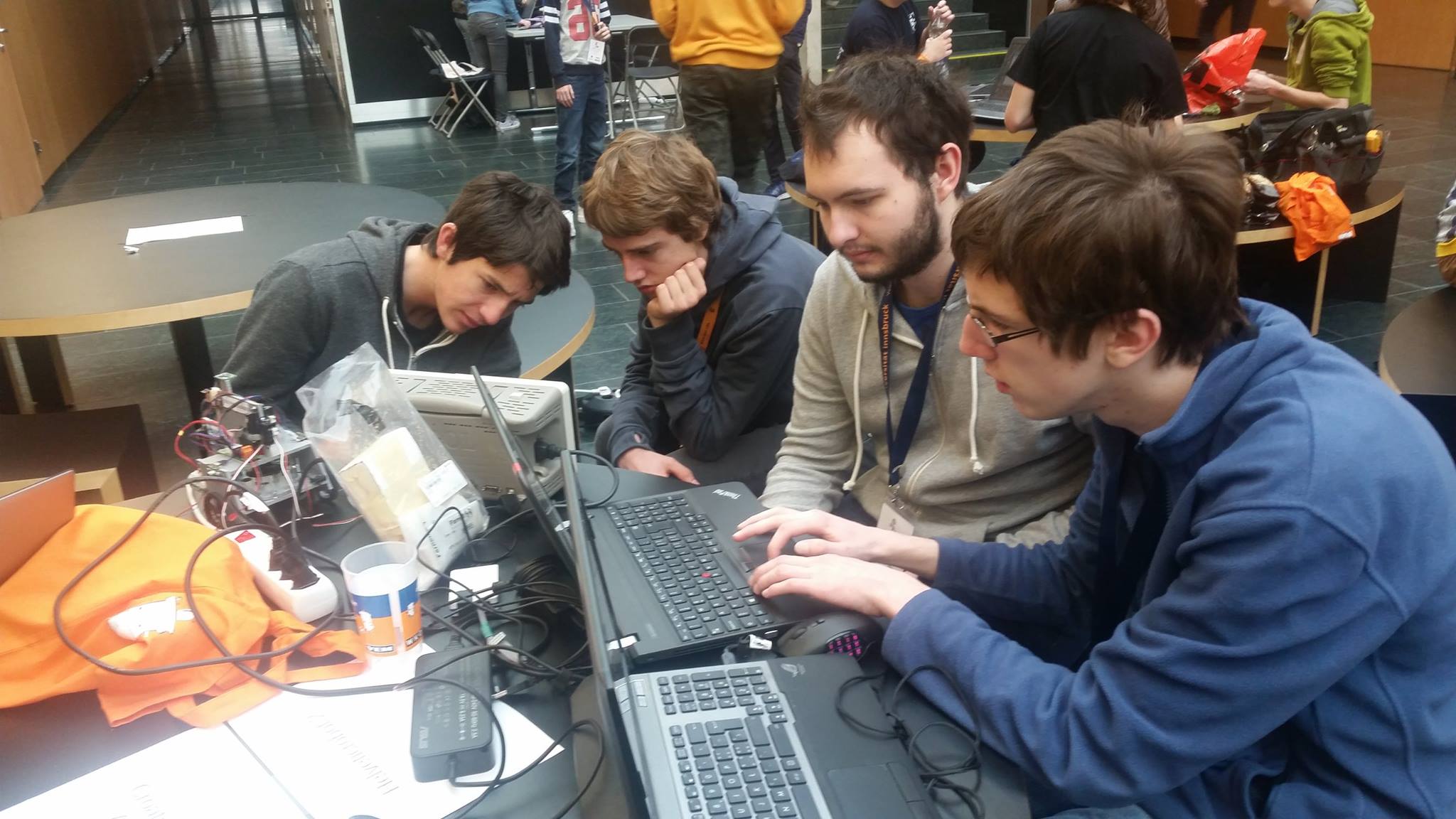
Nach etwas gehetzten aber leckeren Morgenessen trafen wir um 8:30Uhr in der Uni beim Wettbewerbsstandort ein. Nach kurzer und bündiger Registration und Informationserhaltung richteten wir unsere Arbeitsplätze ein und begannen mit der Arbeit. Die Arbeitsflächen waren unglücklicherweise etwas arg begrenzt und wir hatten einige Probleme genügend Oberfläche für alles zu finden. Ausserdem war es in der Halle schon bald glühend heiss und laut. Wir nahmen die Arbeit dennoch auf und versuchten unser Bestes die vorhergegangenen Fehler zu beheben. Gegen Mittag hatten wir dann unseren ersten Wertungslauf, der allerdings nicht zu unserer Zufriedenheit verlief und so nahmen wir nach einem kurzen Mittagsessen in der Kantine unsere Arbeit wieder auf und versuchten weiterhin Fehler zu beheben. Gestärkt durch das Mittagessen, konnten wir konzentriert an den Fehlern weiterarbeiten. Kurz danach hatten wir schon wieder einen Wertungslauf, welcher leider durch Fehler der Kalibration der Sensoren auch eher weniger positiv auswirkte. Dies Problem liess sich dann am späten Nachmittag im Test-Spielfeld wieder beheben. Wir versuchten die Zeit, welche wir an der Uni hatten gut zu nutzen, da wir dort die Spielfelder um zu Testen hatten.
Nach einer kurzen Nacht konnten wir mit neuen Ideen und neuer Motivation uns wieder in das Getümmel stürzen. Wir konnten die fatalsten Fehler am Abend zuvor beheben und somit mit neuem Konzept an den Wertungsläufen teilnehmen. Leider machte jedoch die Elektronik ab einem bestimmten Zeitpunkt nicht mehr mit und wir mussten uns nun zuerst auf diese konzentrieren. Dadurch verloren wir enorm viel Zeit und viel Kraft. Leider liess sich dieses Problem nicht mehr beheben und wir mussten durch Zeitmangel dem letzten Wertungslauf niedergeschlagen entgegen treten. Wir konnten trotzdem viel mitnehmen, da wir nun alle einen tiefen Einblick in die Komplexität der Elektronik bekamen und wir bemerkten wie wichtig Teamarbeit sein kann.