Mechanik
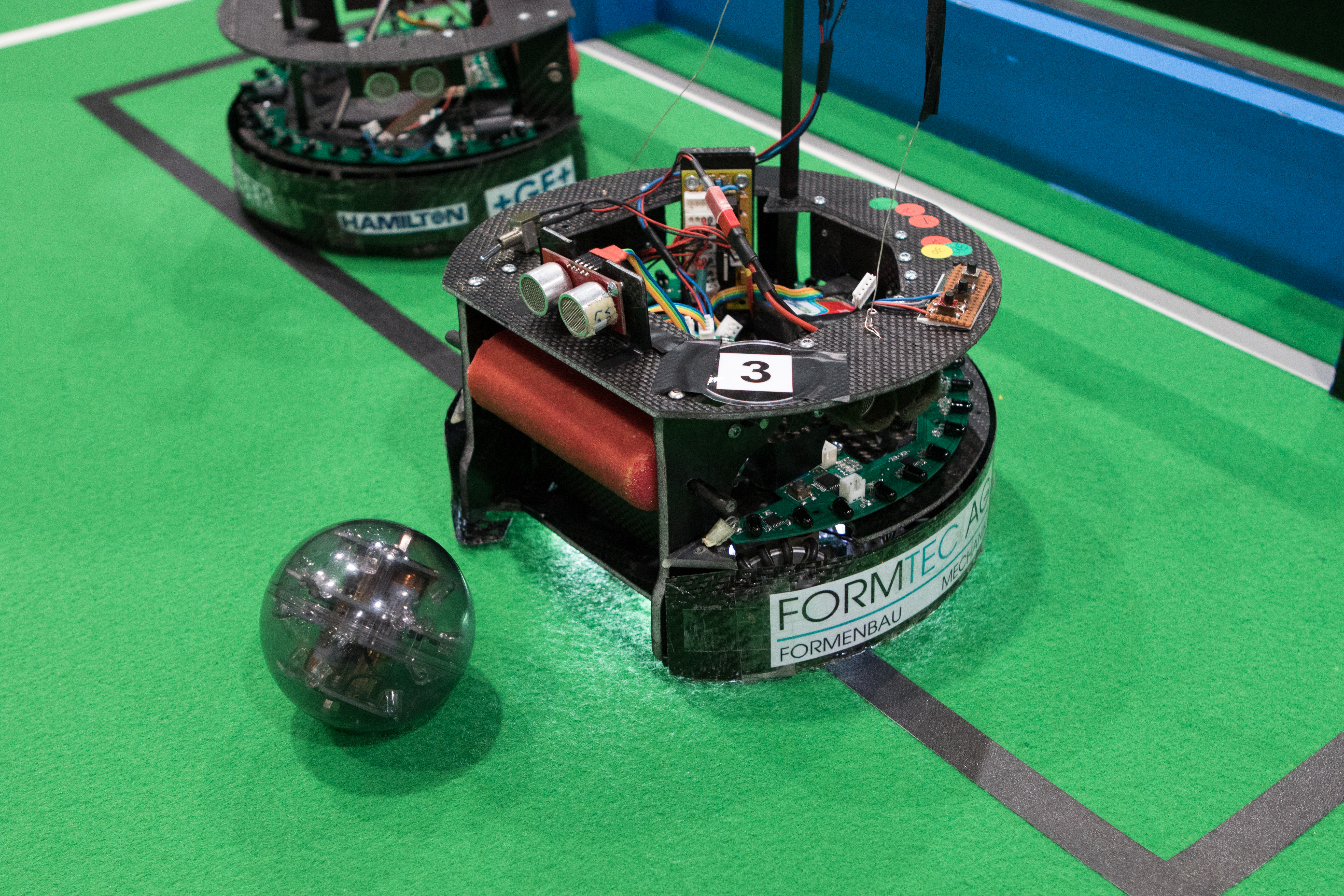
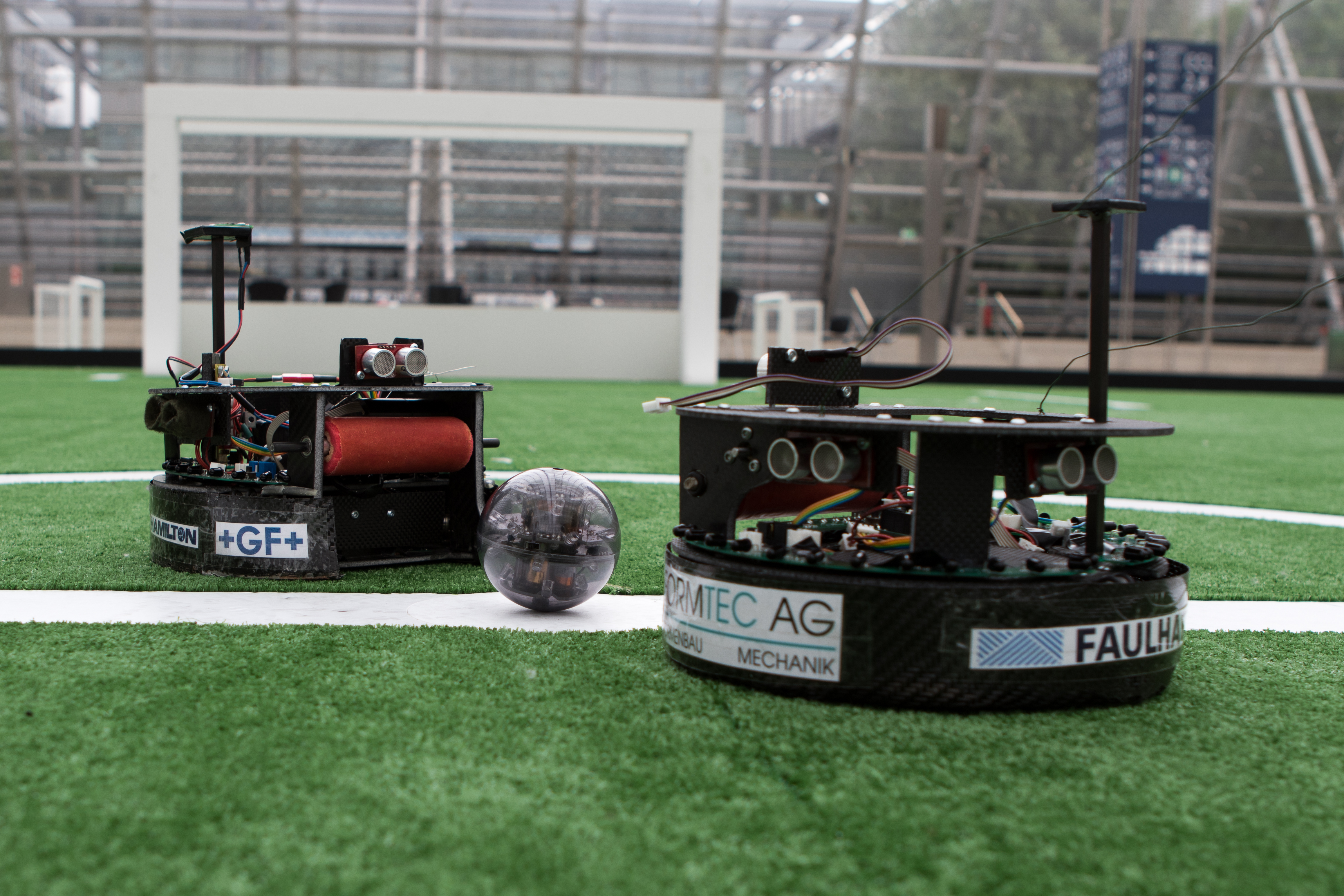
In den ersten zwei Wochen stellte ich das CAD für unseren Roboter fertig. Eine besonders grosse Herausforderung stellte das Auffangsystem der Bälle dar. Ich entschied mich ein Schaufelrad an der Hinterseite des Bots zu befestigen, um die Bälle auf das obere Deck zu schaufeln. Für dieses System brauchen wir nur einen Servomotor. Nach diesen zwei anstrengenden Wochen versuchte ich aus einer grauen PVC Platte einzelne Teile herausschneiden. Die einzelnen Schnittstellen sind jedoch wieder zusammengeschmolzen. So musste ich die einzelnen Schnitte doppelt sagen um die Teile aus der PVC Platte zu bekommen. Um diese Problem zu minimieren, montierte ich das Sägeblatt der Dekupiersäge verkehrt herum, damit die einzelnen Plastikspäne sich nicht hinter dem Schnitt verschmelzen. Ende des Monats habe ich alle Teile ausgeschnitten und montiert, damit der Bot fahren kann.
Software
Im Januar habe ich Sensoren für unseren Roboter ausgewählt und diese auf ihre Funktionstüchtigkeit getestet. Die beiden Lichtsensoren haben ohne Probleme funktioniert, was bei den Farbsensoren leider nicht der Fall gewesen ist, weshalb ich noch andere heraussuchen muss. Diese beiden Farbsensoren haben entweder gar keine Werte ausgegeben oder solche mit viel zu kleinen Unterschieden. Weiter habe ich meine ersten Programme für das Arduino Board geschrieben. Ein Erfolgserlebnis war es, als unser Prototyp losgefahren ist.
Auch habe ich gelernt den Encoder auszulesen, was noch nützlich sein wird.
Weiter habe ich noch ein Programm für die Linienfolge beim Rescue Line geschrieben, welches wir mit der fertigen Elektronik ausprobieren werden.
Elektronik
Ich habe im Monat Januar ein Motorboard und verschiedene Kabel fertig gelötet, mit einem weiteren Motorboard habe ich angefangen. Das grösste Erfolgserlebnis war, dass das Motorboard einwandfrei funktionierte, als wir es zum ersten Mal an das Arduino Uno Board und an die Motoren anschlossen. Allerdings war es eine grosse Herausforderung zum ersten Mal so viele kleine Kontakte und Kabel zu Löten. Ich hatte vor allem Mühe mehrere Kabel an dieselbe kleine Lötstelle auf der Platine zu Löten. Deshalb fragte ich bei den älteren Elektronikern nach einer Lösung, welche ich auch prompt erhielt. Die Lösung war, durch das Erstellen von Lötbrücken zwischen zwei einzelne Lötpunkten auf den Platinen eine gössere Lötfläche zu erhalten, wodurch es einfacher ist mehrere Kabel an denselben Kontakt zu löten.
Alles in allem habe ich in diesem erfolgreichen Monat sehr viel Neues und Interessantes gelernt.