28.07.2017, 2. Wettkampftag
Der 2. Wettkampftag startete mit dem Spiel gegen Japan um 10:10 Uhr. Die erste Hälfte gegen das Heimteam war sehr ausgeglichen und eines der schönsten Spiele, die Helveticrobot je gespielt hat. Wir führten zwischenzeitlich sogar mit 5 zu 4. In der zweiten Spielhälfte zeigte sich jedoch die Bau- und Programmierkunst der Japaner und sie siegten mit 10 zu 5. Obwohl wir das Spiel verloren hatten, waren wir aber dennoch glücklich so ein schönes Spiel gesehen zu haben. Frohen Mutes machten wir uns an die Arbeit, denn es waren trotz dem schönen Spiel einige noch verbesserungswürdige Sachen aufgefallen. So drehte zum Beispiel die Dribblerrolle durch, die Roboter fuhren noch immer aufs Tor und der Torhüter verbrachte seine Zeit lieber beim gegnerischen Tor als beim eigenen.
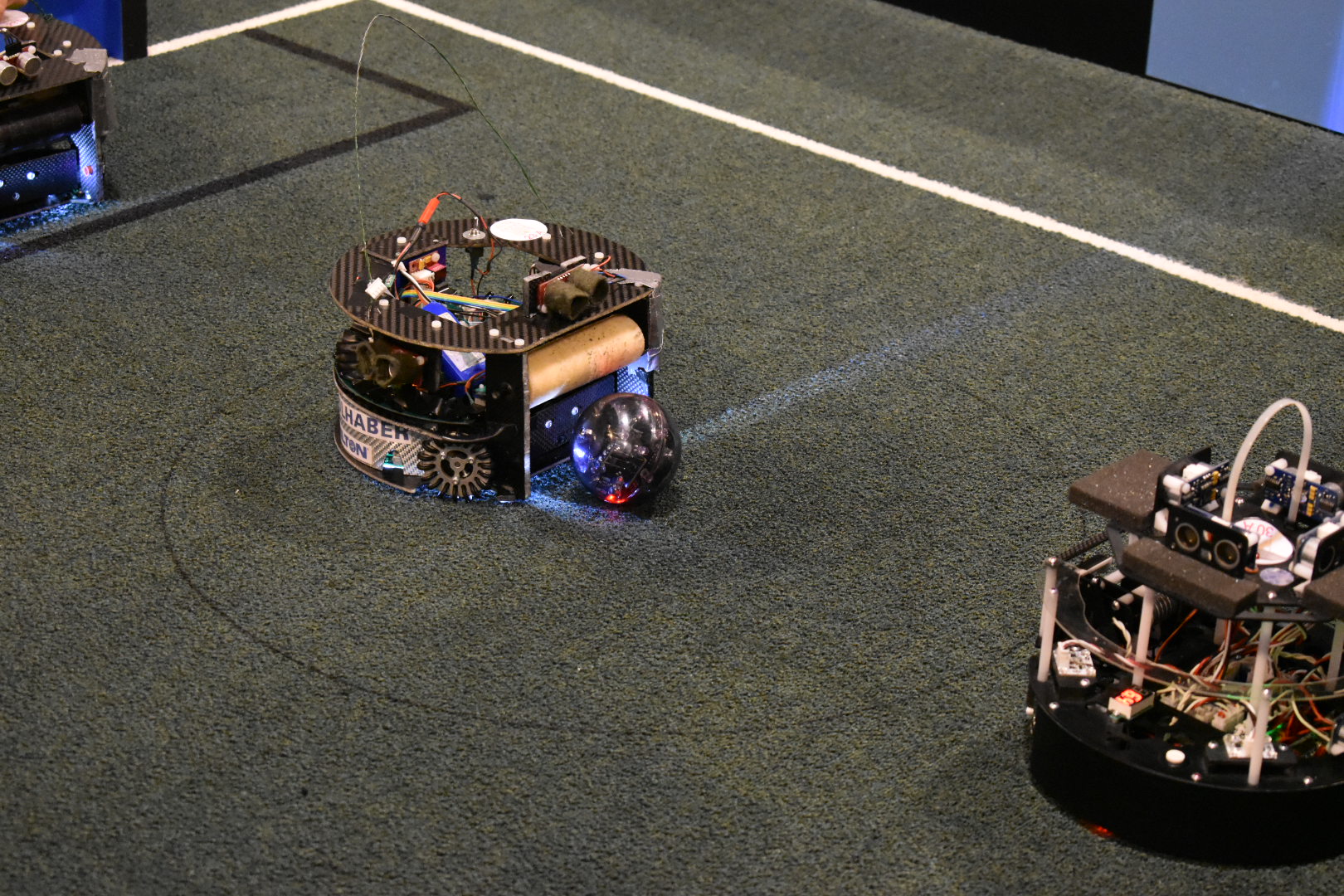
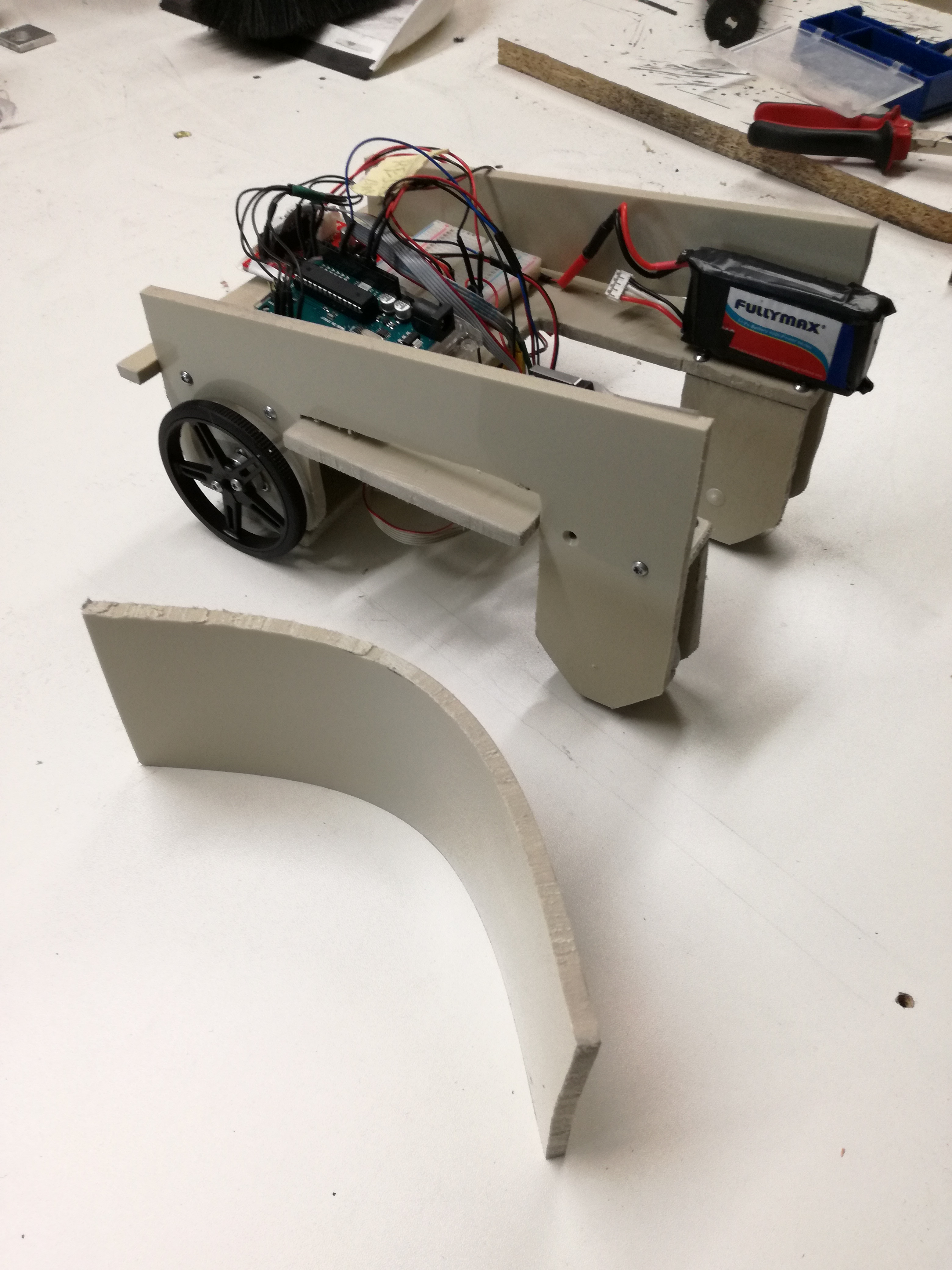
Unser Roboter kurz vor dem Anspiel
Stolz auf unser Spiel gegen Japan!
von l. nach r.: Jan Puntschart, Curdin Steinauer, Gian Flurin Beart, Andrea Cavelti, unsere Gegner aus Japan
Um 13:40 Uhr dann das grosse Desaster. Das Spiel gegen unsere SuperTeam Kameradeninnen von Singapur stand an. Wir waren uns ziemlich sicher, dass wir dieses Spiel gewinnen konnten und auch werden. Leider verhing sich aber ein Kabel in den Zahnrädern des Dribblers. So konnte unser Stürmer nicht mehr dribbeln. Beim Versuch die Zahnräder von den Kabeln zu befreien schoss Singapur 10 Tore und so verloren wir das Spiel automatisch mit 10 zu 0. Niedergeschlagen und enttäuscht gingen wir dann etwas essen um danach mit neuen Ideen weiterzuarbeiten.
Viel Zeit blieb leider nicht. Um 15:40 hatten wir bereits das zweite Superspiel (Spiel der SuperTeams). Leider haben wir auch dieses Spiel verloren. Dafür haben wir etwas Wichtiges erkannt: Unser Roboter sah die Linien sehr gut und fuhr fast nie aus dem Spielfeld. Leider bemerkten wir auch dass unsere Roboter den Ball immer schlechter sahen. Das war wohl das grösste Problem welches wir hatten und daran mussten wir arbeiten. Ausserdem war der Torhüter immer noch nicht perfekt, deshalb arbeiteten wir auch bei ihm weiter.
Am Ende des 2. Wettkampftages liegen wir auf dem 15. Zwischenrang. Da wir noch drei Spiele haben, ist jedoch noch einiges möglich.
Am Abend hatten wir dann noch ein sehr lustiges Abendessen mit vielen Fotos und Zeichensprache, da die Kellnerinnen fast kein Englisch konnten. Am Schluss erschienen wir auf der Facebookseite des Restaurants als Touristen aus Schweden, aber das kennen wir Schweizer ja.

Ein lustiger und schöner Abschluss des 2. Wettkampftages