Nach dem Setup-Day gestern ging es heute erst so richtig los. Auf der Suche nach ein wenig Frühstück starteten wir mit einem gemütlichen Spaziergang durch Montreal in den Tag. Danach ging es aber schnell in die Halle, denn um 09:30 Uhr fing die Phase der Zertifizierung der Roboter an, an welcher jedes Team ihre Roboter auf die Vorgaben überprüfen lassen muss. Für uns gab es da keine grösseren Probleme, wir waren sogar so leicht, dass wir uns überlegten, ein wenig extra Gewicht in die Roboter einzupflanzen. Dies taten wir jedoch erst nach dem ersten Spiel, welches um 10:50 Uhr stattfand. Gegen Italien konnten wir uns leider nicht durchsetzen. Am Ende verloren wir dieses erste Spiel mit 0:8 Toren. Kein guter Start in die diesjährige Weltmeisterschaft. Glücklicherweise waren die Problemzonen schnell gefunden. Zum einen war der Dribbler mehrmals ausgefallen, da die Zahnräder nicht mehr ineinandergriffen. Zum anderen liess die Linienerkennung zu Wünschen übrig, mehrere Male mussten wir unsere Roboter vom Spielfeld nehmen. Nach dem Spiel ging es darum, diese Probleme so gut wie nur möglich zu beheben, denn bereits um 13:40 Uhr fand unser nächstes Spiel in der Einzelwertung statt. Das Spiel gegen die Niederlanden war sehr intensiv, nicht unbedingt weil es ein ultraspannendes Spiel mit wunderschönen Toren war, sondern eher weil es zwar sehr knapp zu und her ging, beide Teams aber nicht die am besten funktionierenden Roboter besassen. Glücklicherweise endete es mit einem Spielstand zu unseren Gunsten. Wir konnten uns mit 4:3 Toren Sieger nennen! Somit stand auch unsere Platzierung nach dem ersten Wettkampftag fest: 19. Rang von insgesamt 28 Teilnehmern. Es hat da sicherlich noch Luft nach oben, denn unser Ziel ist nach wie vor die Top 7.
Nach einem verspäteten Mittagessen ging es dann an die Vorbereitung fürs erste Superteam-Match der Weltmeisterschaft. Unser Superteam besteht aus den Nationen Mexiko, Japan, USA, Portugal und natürlich der Schweiz, also wir selber. Um 17:40 Uhr ging das Spiel los. Zunächst wurden wir auf ein anderes Spielfeld verlegt, da auf dem unseren noch ein Spiel lief. Dann kehrte ein wenig Verwirrung in unserem Superteam ein, da wir total verschlafen haben, vor dem Spiel ein kleines Gespräch über die Funktionen der einzelnen Roboter zu führen. Das Spiel verloren wir dann auch mit 2:9, einem Spiel, in welchem wir den grossen Teil der Zeit nicht wirklich dem Ball gefolgt sind.
Abschliessend kann man sagen, das der Start in diese Weltmeisterschaft nicht optimal verlief, es jedoch immer besser lief. Hoffentlich setzt sich diese Steigerung auch am morgigen Tag fort.
RoboCup Junior 2018, Montreal/Kanada: Setup-Day
Nachdem wir gestern nach rund sieben Stunden Flugzeit in Montreal gelandet sind, ging es heute zum ersten Mal in die grosse Halle, in welcher die Weltmeisterschaft stattfinden soll. Da heute «nur» Setup-Day war, gab es für uns noch keine Spiele zu bestreiten, dafür hatten wir umso mehr Zeit, ein paar letzte Verbesserungen und Checks durchzuführen. Es ging mit einem lästigen Problem in der Mechanik los: Einige Omniwheels konnten sich nicht frei drehen und störten so die Bewegungsfreiheit des Roboters. Dies konnte aber schnell mit dem Dremel gelöst werden. Da wir bereits um 13:15 Uhr unser technisches Interview hatten – ein Gespräch mit Experten, in welchem wir unseren Roboter von der technischen Seite und unser Team vorstellen können und auch Fragen zum Bauprozess oder sonstiges zum Roboter beantworten müssen – mussten wir uns sputen. Es gab nämlich noch einiges vorzubereiten. So lag das Augenmerk hauptsächlich auf die komplette Fertigstellung und Verschönerung des CADs, doch auch auf die Fertigstellung der zweiten Hülle inklusive Sponsorenkleber. Für die Software ging es einfach ums Testen der Roboter und Kalibrieren der Sensoren. Am Interview konnten wir dann unseren Roboter vorstellen und mit der eingebauten Technik (und deren Preise) die Experten verblüffen. Nach dem Mittagessen blieb keine Zeit fürs erste Schweizer-Spiel an der Fussballweltmeisterschaft in Russland, denn unsere Weltmeisterschaft hat natürlich Vorrang. Am Nachmittag ging es deshalb vor allem ums Testen der Linien- und Ballsensoren. Andrea Däppen, unser Teamcaptain, musste schliesslich noch an das Captain-Meeting, an welchem viele Informationen über die nächsten Tage preisgegeben wurden. So erfuhren wir zum Beispiel mit welchen anderen Teams wir ein Superteam bilden und gegen wen wir das erste Spiel der Weltmeisterschaft bestreiten werden. Das ist jedoch Material für den morgigen Bericht.
April 2018: Wettbewerbszeit!
Das Augenmerk des Monats lag natürlich auf dem Austrian Open in Linz. Am 13. und 14 April konnten Challenge- wie auch WM-Team tolle Resultate am österreichischen Wettbewerb erzielen. Dem Challenge-Team reichte es für den 7. Rang in der Kategorie Rescue Line. Das WM-Team hingegen konnte sich in einem spannenden Finalspiel mit 10:7 durchsetzen und sich den ersten Platz sichern.
Von den spannenden Tagen wird ausführlicher in den beiden Wettbewerbsberichten erzählt.
Entsprechend des nahenden Wettkampfes war natürlich Challenge- wie auch WM-Team auf das Testen und Anbringen letzter Verbesserungen fokussiert. Im WM-Team wurde an den Fahrgeschwindigkeiten herumgeschraubt und versucht das Ganze zuverlässiger zu machen. Beim Challenge-Team stand die Erkennung der silbernen Linie im Vordergrund, welche leider letztens doch nicht funktionierte.
Die zweite Aprilhälfte verbrachte das Challenge-Team nur noch mit dem Abschliessen des Projekts und dem Aufräumen der Arbeitsplätze. Bei dem WM-Team sah es da schon etwas anders aus. Mithilfe des vielen Videomaterials wurden diverse Verbesserungsvorschläge diskutiert und in zwei Teamsitzungen die zu bearbeitenden Punkte bestimmt. In allen Bereichen ist noch reichlich Potenzial vorhanden, sei dies bei der Mechanik an einem verstellbaren Dribbler zu arbeiten, mithilfe elektronischer Tricks unseren Kicker zu verstärken oder die Strategien in der Software zu verbessern. Die Mechanik konzentrierte sich in den letzten beiden Wochen hauptsächlich auf eine neue Bauweise für die Hüllen der Roboter sowie eine Testplattform für das neue Fahrwerk. Die Elektronik hatte mit den neuen Motoren alle Hände voll zu tun. Die neuen Platinen mussten bestellt und bestückt werden. In den bisherigen Tests konnten bereits einige erfolgsversprechende Resultate erzielt werden. Leider funktioniert es zur Zeit noch nicht zuverlässig genug, so dass mit den neuen Motoren noch nicht gefahren werden kann. Damit die neuen Boards überhaupt genutzt und getestet werden können, musste an der Software ebenfalls etwas weitergearbeitet werden. Die verwendeten Bauteile verlangen nach einer höheren PWM Frequenz als bis anhin, entsprechend mussten Änderungen vorgenommen werden und die Frequenz wurde auf 32kHz erhöht. Weiter testen wir unseren vielseitigen Sensor CMPS11. Bis anhin wurde nur der Kompass verwendet, der Sensor bietet aber auch einen Accelerometer und ein Gyro. Zur Zeit wird an dem Gyro für bessere Orientierung getestet, doch auch den Accelerometer wollen wir in Zukunft für eine bessere Orientierung auf dem Spielfeld nutzen. Eine noch ungelöste Herausforderung bei dem Gyro ist, dass eine korrekte Kalibration scheitert und der Sensor bei Stillstand falsche Werte liefert.
Robocup Junior Austrian Open 2018 (2): Die Sensation!
Nach einer geringen Portion Schlaf und Erholung machten wir uns am Morgen auf dem Weg zum Wettbewerbsgelände. Der zweite und zugleich letzte Wettkampftag stand an, wobei unsere beiden Teams noch unterschiedlich viel Arbeit vor sich hatten. Das Challenge-Team hatte nur noch ein Wertungslauf um für eine bessere Platzierung im Schlussklassement zu kämpfen. Das WM-Team hingegen musste sich zuerst im Halbfinale beweisen, um dann hoffentlich am Finale teilhaben zu können. So war man zu Beginn des Tages begierig, alles Mögliche für den Erfolg zu tun.
Beim Challenge-Team ging es zuerst nochmals an die Erkennung der grünen Flächen, denn diese funktionierte noch nicht wunschgemäss. Dies wurde jedoch ziemlich flott fertiggestellt. Als nächstes hat das Team die ihnen zugeteilte Arena für den letzten Wertungslauf inspiziert und allfällige kritische Punkte gesucht. Um dies optimal zu testen haben sie mit ein bisschen Klebeband die Arena nachgebaut und angefangen, den Roboter für den letzten Wertungslauf vorzubereiten. Dann war es auch ziemlich schnell wieder soweit: Der letzte Wertungslauf ihres einzigen Wettbewerbes dieser Saison stand an. Dieser klappte zwar gut, doch nicht so wie erhofft. Das grösste und auch ziemlich einzige Problem war die Geschwindigkeit des Roboters. Jeder Wertungslauf dauert nämlich genau 8 Minuten, und wenn der Roboter nicht genügend schnell ist, kann man leider nicht alle Punkte erzielen. Mit 101 erreichten Punkten war dieser Lauf aber trotzdem noch akzeptabel, womit das Team am Ende des Wettkampfs eine Gesamtpunktzahl von 268 Punkten erreichte. Das Team klassierte sich damit auf Platz 7 von insgesamt 37 Teams!

Der Roboter des Challenge-Teams
Beim WM-Team musste vor allem an der Software gearbeitet werden, die Stürmer Strategie brauchte eine Erweiterung um sich gegen das bessere Team ansatzweise beweisen zu können. Trotzdem wurde als erstes noch eine Dribblerrolle ausgetauscht, weil die «alte» eine Nummer zu dick mit Latex bestrichen worden war und der Roboter auf dem Feld spulte anstelle der gewünschten Fahrwirkung. Danach ging es aber wirklich ran an den Speck. In kürzester Zeit konnten die Programmierer des Teams eine Strategie auf die Beine stellen, mit welcher eine Chance bestand einen spannenden Final auszutragen. Die Idee war, dass der Stürmer den Ball in den Dribbler nimmt, sich dreht, rückwärts zum gegnerischen Tor fährt und sich um den gegnerischen Goalie herumdreht um diesem jegliche Angriffsmöglichkeit auf den Ball zu nehmen. Für die kurze Zeit in der diese Strategie programmiert wurde funktionierte diese auch sehr gut. Einzig der Kicker war noch ein bisschen zu schwach und die Drehung vor dem Tor passierte noch ein klein wenig zu spät, sonst war es aber eine mehr als akzeptable Lösung um schöne Tore zu schiessen. Wegen ungenügender Tests wurde im Halbfinal noch auf die neue Strategie verzichtet und mit der gleichen Strategie wie am Vortag gefahren: Ball suchen, nehmen und gerade zum gegnerischen Goal schieben. Trotz des noch nicht verbesserten Stürmers konnte das Halbfinal mit 10 Toren Differenz gewonnen werden. Somit standen die Finalteilnehmer fest: Unser WM-Team gegen das beste österreichische Soccer Lightweight Secondary Team. Und was ein nervenzerreissender Final das war! Nach einem fatalen ersten Goal gegen uns ging es aber schnell bergauf. Das gegnerische Team hatte Probleme mit der Linienerkennung und war so oftmals nur mit dem Torhüter auf dem Spielfeld. Da schlug dann die neue Strategie zu. Obwohl der gegnerische Torhüter sehr gut und schnell auf den Ball reagiert hat, konnten wir einige Tore schiessen indem wir uns ihm rückwärts annäherten und dann im letzten Moment um ihn herum drehten. In der zweiten Halbzeit, als wir bereits einen guten Vorsprung gewonnen hatten, kam der Stürmer der Österreicher zurück ins Spiel. Sogleich erzielte dieser drei Tore, es wurde uns etwas bange. Glücklicherweise reagierte J, unser Stürmer, darauf und schoss wunderbare Goals zwischen den beiden Pushbots hindurch, nach wie vor mit der Strategie mit der verkehrten Anfahrt und Drehung vor dem Goal. Alles sah sehr gut aus bis unsere Gegner es noch einmal krachen liessen und wiederum drei Tore in Folge schossen, oder sollte man eher drücken sagen? Wiederum reagierte unser Stürmer aber mit Gegentoren und das Match wurde mit 10:7 für Helveticrobot entschieden. Neben den schönen Goals war das Spiel allzeitig spannend und intensiv und wohl sehr interessant zu betrachten! Zusätzlich sorgten die Schiedsrichter für etwas Pausenunterhaltung als die Stürmer beider Teams wegen verlassen des Spielfeldes deaktiviert waren. Als beide Goalies den Ball aus ihrer Zone anstarrten liessen die Schiedsrichter denn Ball einfach quer darüber schiessen um beide Goalies zu ein wenig mehr Bewegung zu animieren und die anhaltende Langeweile zu überbrücken.

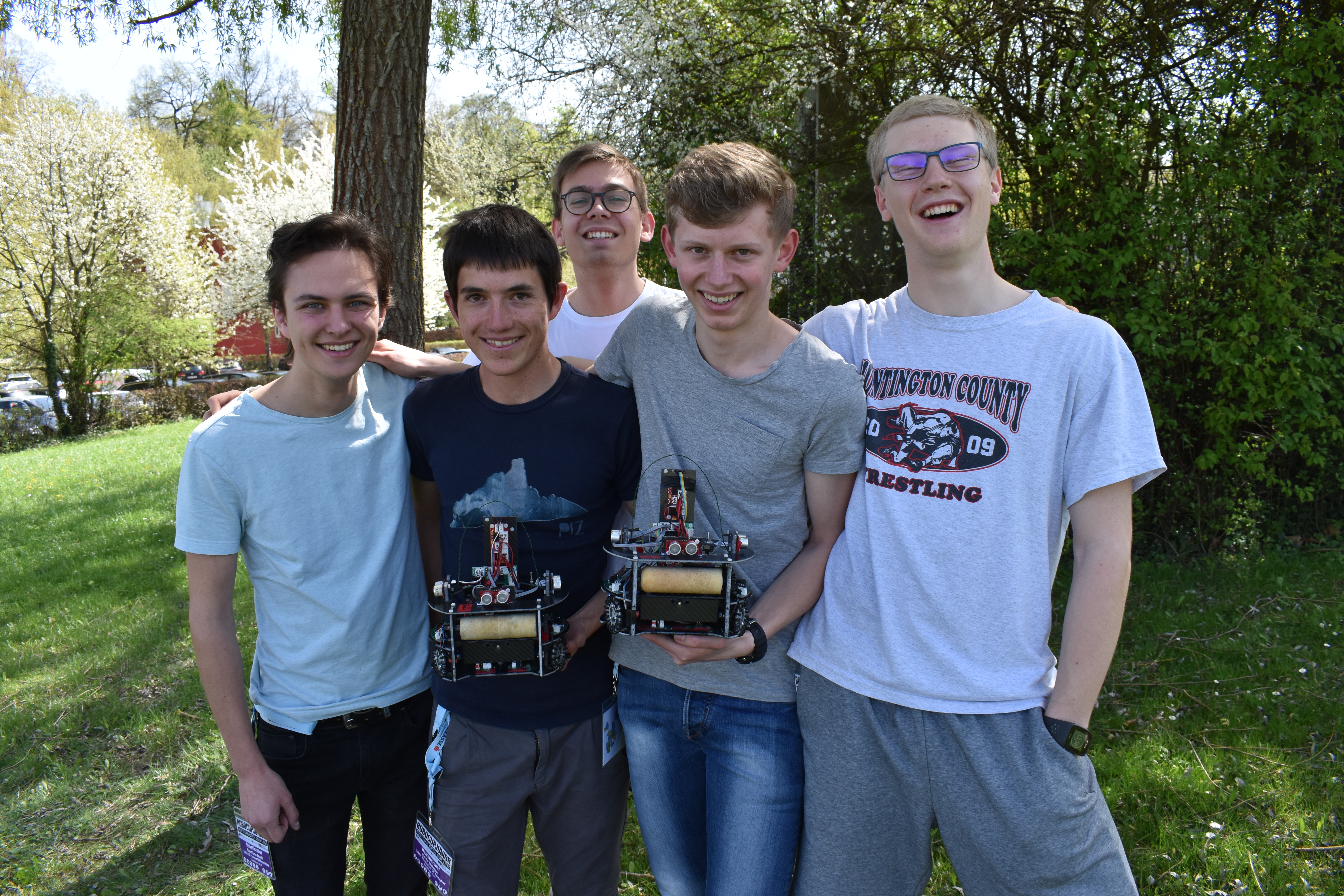
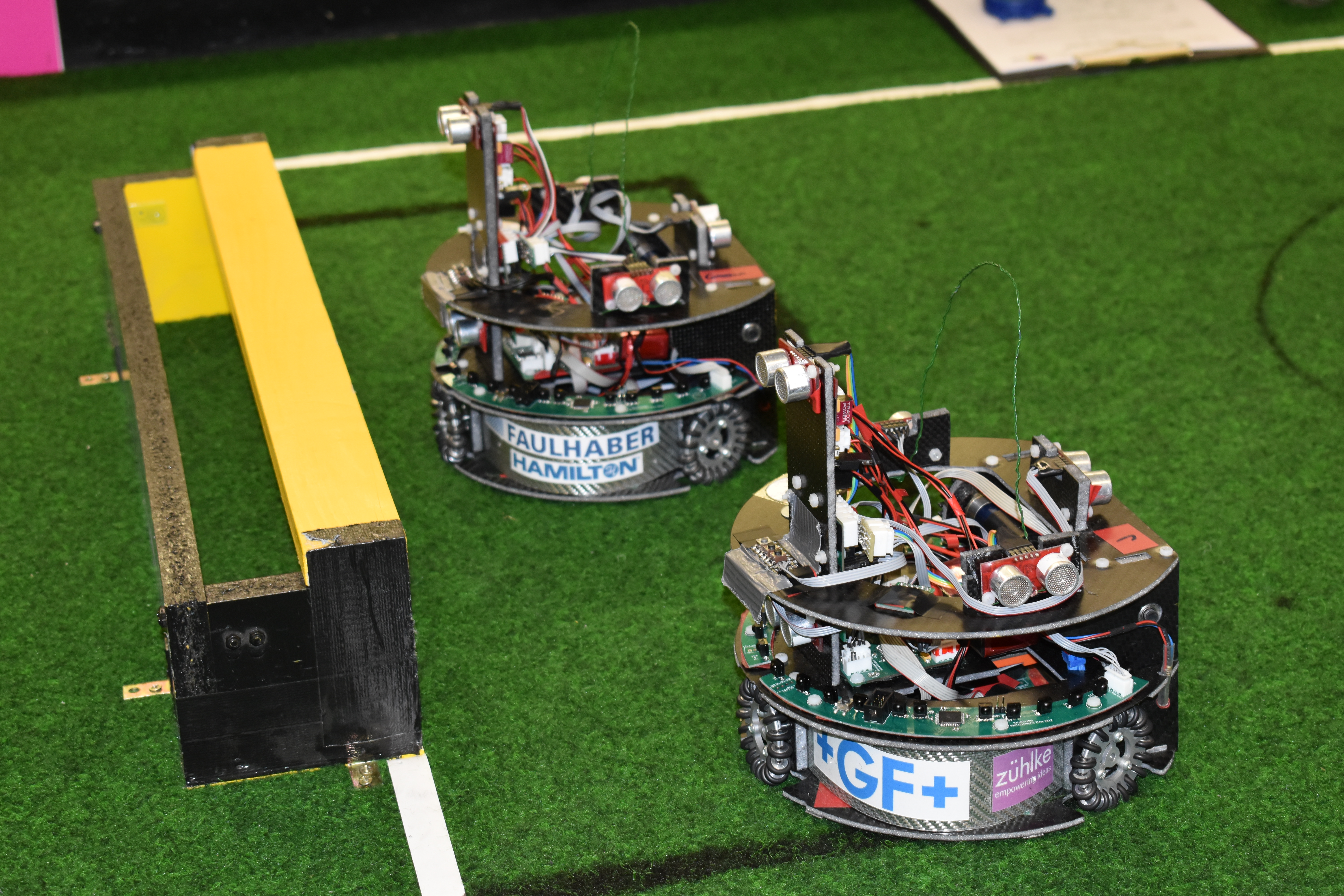
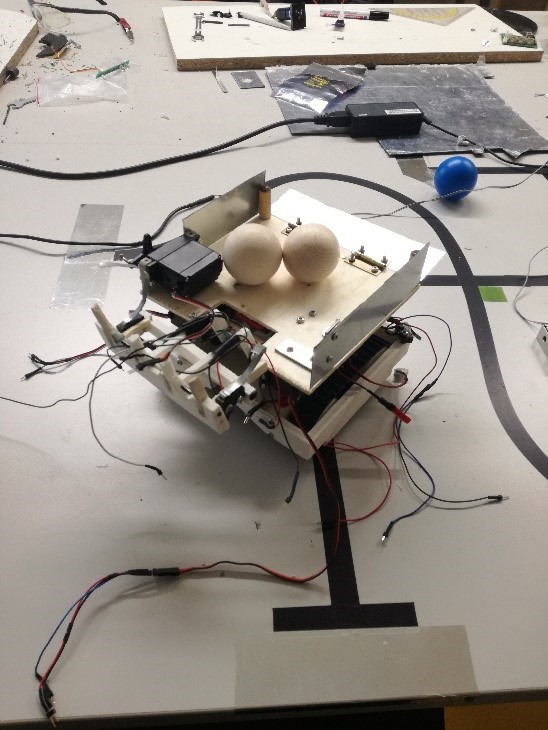
Die Roboter des WM-Teams
Nach einem kurzen konstruktiven Gespräch mit unseren Gegnern machten wir uns ans Zusammenpacken und erwarteten die Siegerehrung. Gross war natürlich die Freude in unserem Team über das gewonnene Match, nicht nur weil es den Turniersieg bedeutete, sondern umso mehr weil wir ein schönes Spiel für uns entscheiden konnten. Es zeigt auch, dass wir auf einem sehr guten Weg sind, ein gutes Resultat an der Weltmeisterschaft in Montreal/Kanada zu erzielen. Nach der Siegerehrung und dem Erhaltenen der Leistungszertifikate mitsamt Siegerpokal ging es für die ganze Helveticrobot-Delegation zurück zum Hotel und danach zum Bahnhof, wo uns eine weitere sechs Stunden Heimfahrt bevorstand. Diese nutzten wir, um nochmals den Wettbewerb und das letzte Spiel zu analysieren um so herauszufinden, wie die Roboter bis zur WM noch verbessert werden können.
Das WM-Team mit Mentor Andrea Cavelti (Mitte) nach dem gewonnenen Final
Für Helveticrobot war dieser Wettbewerb einer der besten Austrian Open, die wir je absolviert haben. Mit neuer Motivation und neuen Ideen bereiten wir uns nun auf die Weltmeisterschaft vor und das Challenge-Team so langsam aufs nächste Jahr.

Das Wm-Team (hinten) und Challenge-Team (vorne)
Robocup Junior Austrian Open 2018 (1): Ohne Fleiss kein Preis
Wie in jedem Jahr nehmen unsere beiden Teams auch dieses mal an den Austrian Open in Österreich teil. Dieses Jahr findet der Wettbewerb in der schönen Stadt Linz in Oberösterreich statt.
Nachdem wir am gestrigen Donnerstag angekommen sind und unser Gepäck im Hotel verstaut haben, machten wir uns sogleich auf dem Weg zum Wettbewerbsgelände, welches dieses Jahr eine pädagogische Hochschule ist. Nach dem Early Check-In ging es dann auch schon an die Arbeit, um möglichst viele Fehler noch vor dem ersten Wettbewerbstag zu beheben. Beide Teams konnten in dieser Phase noch einiges verbessern und haben somit ihr „Znacht“ redlich verdient.
Am nächsten morgen ging es dann endlich zum los: Der erste Wettbewerbstag wartete und trotz frühem Aufstehen waren beide Teams motiviert und voller Vorfreude. Beide Teams begannen sofort nach der Ankunft mit den ersten Tests. Beim WM-Team, für welches dieser Wettbewerb eine perfekte Vorbereitung für die Weltmeisterschaft im späteren Verlauf des Jahres ist, gab es vor dem ersten Spiel ernste Probleme mit dem Motorboard eines Roboters. So musste beim ersten Spiel leider auf einen Roboter verzichtet werden, weshalb das Spiel auch ziemlich deutlich verloren wurde. Zwischen dem ersten und dem zweiten Spiel konnten die Probleme dann aber beseitigt und der zweite Roboter wieder einsatzbereit gemacht werden. Das zweite Spiel fing mit sehr gut an, doch am Schluss musste sich unser Team mit einem unentschieden begnügen. Das lag hauptsächlich am nicht einsetzbaren Kicker. Durch den sehr guten Dribbler konnten wir uns viele Male bis direkt vors gegnerische Tor durcharbeiten, jedoch dem Ball nie den finalen Schups ins Tor geben. So war der Ball oftmals im Tor, hatte jedoch noch nicht die Hinterwand des Tores berührt und wurde somit nicht als Punkt anerkannt. Das war für das ganze Team ganz schön ärgerlich. Genau wegen dieses ärgerlichen Ergebnisses hat das Team nach dem Mittagessen weitergeackert. Am Nachmittag standen schliesslich noch die Rückspiele gegen die gleichen Teams an. Leider waren wir gegen das erste wieder chancenlos: Mit einem Endstand von 11:1 verloren wir dieses Spiel. Trotzdem hat es sehr geholfen, denn durch dieses Spiel konnte erkannt werden, was noch nicht funktioniert und an welchen Dingen noch gearbeitet werden muss. Es war auch gleichzeitig ein historischer Helveticrobot-Moment: Es war das erste mal, dass in einem Spiel mit einem Faulhaber-Linearmotor gekickt wurde. So ging es dann zum Endspurt des ersten von zwei Wettbewerbstagen. Und die Mühe hat sich gelohnt: Das letzte Spiel des Tages wurde 12:2 gewonnen. Nach dem letzten Spiel wurden noch einige Pläne für den Abend im Hotel (natürlich mit Arbeit verbunden) und für den nächsten Tag und die letzten eins bis zwei Spiele gemacht. Dies ging solange, bis wir kurz nach sechs Uhr gebeten wurden, die Halle zu verlassen.
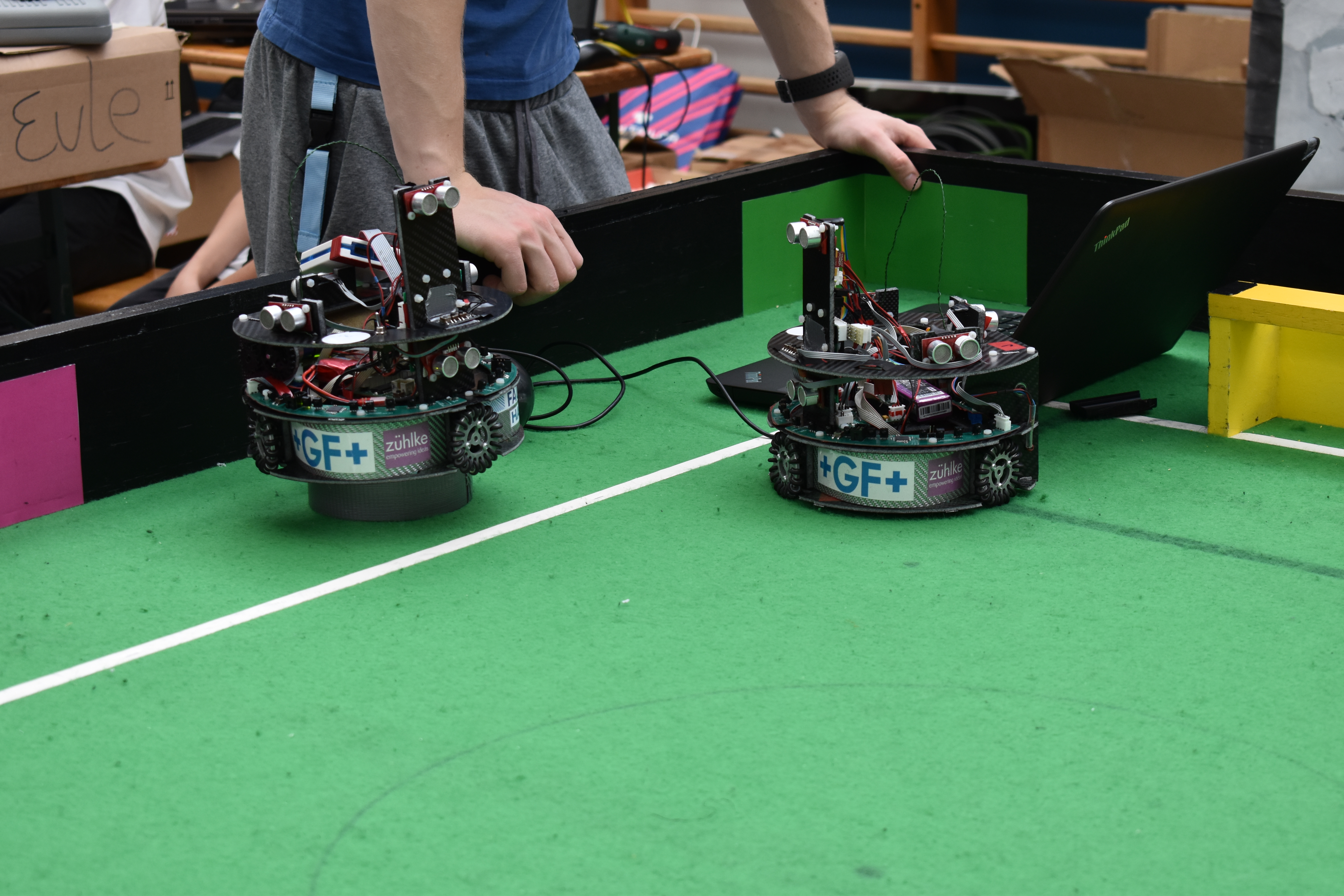
Mit den Robotern des WM-Team wird getestet …
… und gespielt.
Auch beim Challenge-Team ging es mit Vollgas an die Sache. Am Morgen fand der erste von zwei Wertungsläufen statt, wobei ihr Roboter leider noch unvollständig war. So funktionierte die Erkennung der grünen Flächen nicht und auch das Ballaufnahmesystem war noch nicht einsatzbereit. Trotzdem konnte sich das Team 50 Punkte sichern und sich somit unter die besten 50% klassieren, genauer gesagt auf den 14. Rang von etwas über 30 Teams in dieser Kategorie. Danach konnten einige Wohltaten am Roboter vollbracht werden, so dass sie beim zweiten Wertungslauf am Nachmittag stolze 117 Punkte sammeln konnten. Über ihre Platzierung wussten sie am Abend leiser noch nichts, doch man schätzt sie in den Top Ten. Am Abend konnte der Roboter auf einen beinahe perfekten Zustand gebracht werden. Der Roboter erkennt jetzt die grünen Flächen und auch das Ballaufnahmesystem funktioniert. Jetzt muss nur noch software-technisch alles zum Laufen gebracht werden und einige letzten Schliffe fehlen noch, es sieht aber sehr gut aus für eine zufriedenstellende Platzierung unserer Challenge-Teams.

Challenge-Team bei der Arbeit an ihrem Roboter
Beide Teams konnten ihren ersten Wettkampftag der Robocup Austrian Open 2018 erfolgreich und grösstenteils zufrieden beenden und freuen sich, morgen am zweiten und letzten Tag des Wettbewerbs nochmals alles geben zu können.

Es gibt noch einiges zu erledigen und zu verbessern bis der Wettbewerb zu Ende ist.
März 2018, WM-Team: Entscheidungen über Entscheidungen
Wegen dem zweiten Review am 10. März ging es für das WM-Team in hohem Tempo weiter, denn da galt es zu überzeugen und zu zeigen, dass man für die Austrian Open, welche im April stattfinden, bereit ist.
Bei der Mechanik wurde während dem zweiten Review einiges entschieden. So zum Beispiel, dass man für die Austrian Open auf den letztjährigen Dribbler zurückgreifen wird, da der neue einfach noch nicht bereit ist. Trotzdem soll an dem neuen Konzept weiterhin gefeilt werden. Dazu kam die Erkenntnis, dass das Ziel, zwei Roboter mechanisch wie auch elektronisch fertig zu haben, nicht erreicht wurde. Nach dem Review wurde deshalb weiter Teile ausgeschnitten und montiert. Ausserdem wurde entschieden, dass für die Austrian Open die letztjährigen Motoren benutzt werden, da die neuen einfach noch zu viele Probleme bereiten. Zusätzlich wurde über die Anordnung der einzelnen Boards entschieden. Auf der zweiten Ebene ist jetzt nur noch das Motorboard zu finden, während das Power- und Mainboard auf dem sogenannten „Turm“ befestigt sind. Dadurch können grössere Löcher neben dem Motorboard gemacht werden, was zu einer übersichtlicheren und einfacheren Verkabelung führt. Im April geht es dann für die Mechanik an die letzten Schritte, wie zum Beispiel dem Griff und anderen Kleinigkeiten.
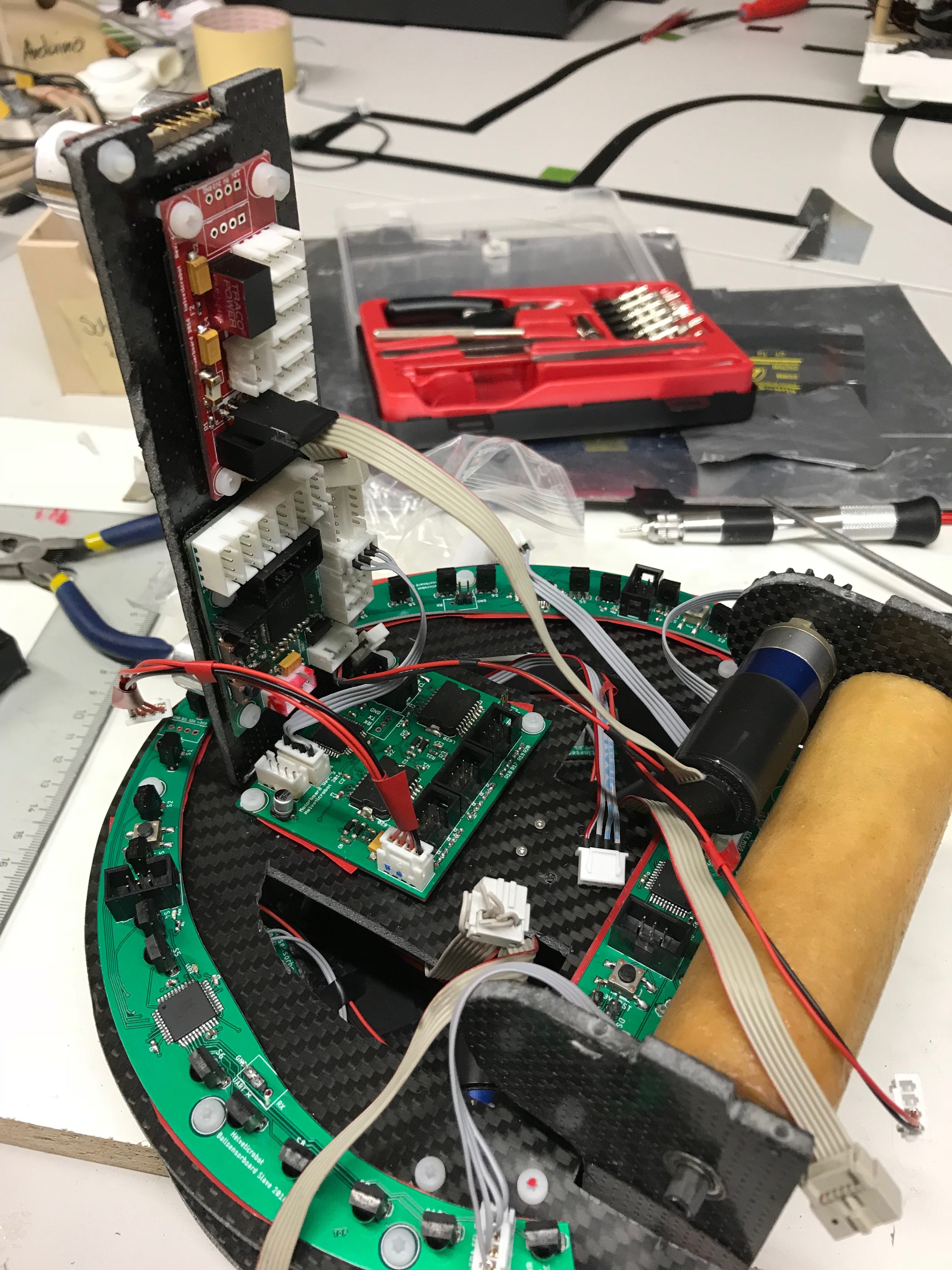
Anordnung der Boards beim Soccer-Roboter des WM-Teams
Die Software hat an der Erkennung der weissen Linie gearbeitet, welche nun zuverlässig funktioniert und dem Roboter erlaubt, im Spielbereich zu bleiben. Ausserdem wurde an der Stürmerstrategie gearbeitet. Das Ziel ist es, mit dem Ball rückwärts zu fahren und so den Ball abzuschirmen, damit der gegnerische Roboter nicht an den Ball gelangen kann. Bei dieser Strategie wurde auch an dem Entlangfahren der Seitenlinie gefeilt, was einige Kopfschmerzen bereitet hat. Momentan kann der Roboter an die Seitenlinie und die richtige Distanz in Richtung des gegnerischen Tors fahren.
Im elektronischen Bereich wurde am Review entschieden, dass man die neuen Motoren mal über ein Motorboard laufen lässt um zu sehen, wie diese im Roboter funktionieren würden. Deshalb hat die Elektronik das neue Motorboard fertig gezeichnet. Dieses wird auch demnächst bestellt. So ist die Wahrscheinlichkeit hoch, dass die neuen Motoren bei der Weltmeisterschaft in Montreal/Kanada zum Einsatz kommen. Ausserdem wurde die gesamte Elektronik für zwei Roboter gelötet, alle dazugehörigen Kabel fertiggestellt und auch noch für ein paar Reserveboards gesorgt.
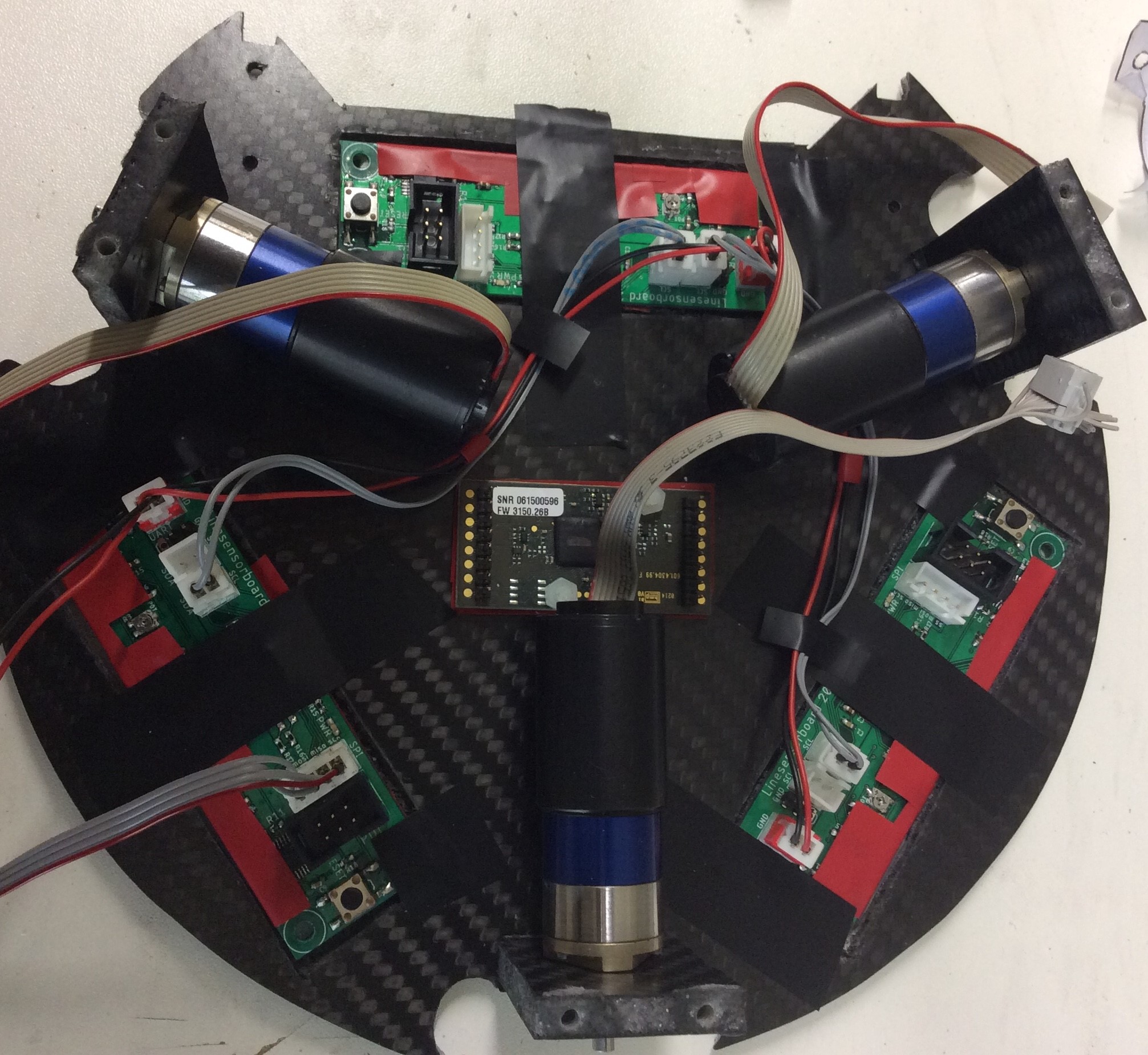
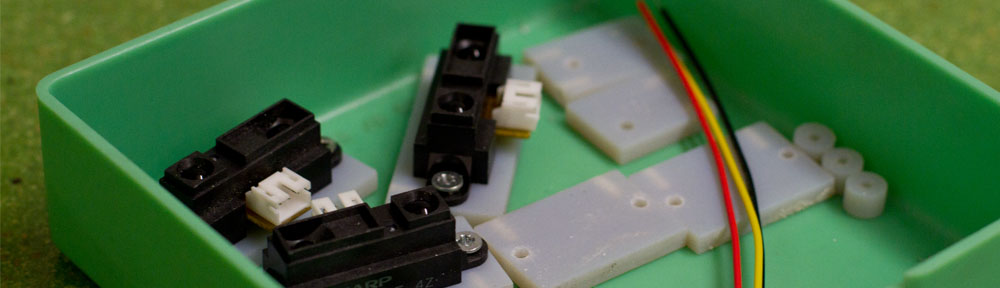
Untere Ebene des Soccer-Roboters mit Linienboards, letztjährigen Motoren von Faulhaber und Kickerboard (ebenfalls von Faulhaber)
März 2018, Challenge-Team: neues Motorboard, neue Motoren
Das grosse Event im Monat März war zweifelsohne das zweite und letzte Review vor den Austrian Open im April. Dieses fand am 10. März statt. Um alle Milestones und Ziele zu erreichen, musste das Challenge-Team einige Stunden Arbeit leisten.
Die Mechanik hat die Motoren ausgetauscht und das Ballaufnahmesystem eingebaut. Ersteres musste getan werden, weil es mit den bisherigen Motoren einige Probleme gab. Nun schmücken kleinere Motoren, welche einwandfrei funktionieren, den Roboter. Diese sind leichter und haben ein kleineres Drehmoment, sind jedoch trotzdem genug stark um den Roboter anzutreiben. Der Einbau der Motoren und des Ballaufnahmesystems verlief ohne grössere Probleme. Damit die Elektronik mehr Platz zur Verfügung hat und die Verkabelung der Boards sich einfacher gestalten, wurde ausserdem der Abstand zwischen den beiden Decks vergrössert. Auf dem oberen Deck finden nun 4-5 Bälle Platz, was für den Wettbewerb vollkommen ausreicht.
Challenge-Roboter von Oben: zwei Bälle auf dem oberen Deck

Challenge-Roboter von der Seite: Die Elektronik (Boards) befindet sich zwischen den beiden Decks
Die Software hat die neue Ansteuerung über das Motorboard in den Code implementiert. Diese neue Ansteuerung der Motoren per SPI und mit neuen Motorboards wurde von einem der Passivmitglieder erstellt. Damit können die Motoren viel genauer angesteuert werden. Auch die Position, in welcher sich ein Motor befindet, kann ausgelesen werden. Ausserdem kann der Roboter nun um einiges langsamer fahren, da das Motorboard die Geschwindigkeit selbst korrigiert. Zusätzlich wurden
einige kleine Änderungen am Line Follower vorgenommen, die Geschwindigkeit des Programms wurde wesentlich erhöht und die Anzahl write-Befehle an das Motorboard stark reduziert. Durch die Implementation der Ansteuerung der Servos kann der Roboter nun seinen Arm nach oben und unten bewegen.
Die Elektronik hat in diesem Monat viel erreicht. Die Motorboards wurden durch neue getauscht. Sie besitzen nun eigene Prozessoren. Dies ermöglicht die Verarbeitung der Daten der Motorenrotation. Mit diesen kann nun im Programm gearbeitet werden. In Zusammenarbeit mit der Mechanik wurde ausserdem ein neues Lichtboard an den Roboter angebracht. So funktionieren die Sensoren besser und der silberfarbene Streifen auf dem Spielfeld kann erkannt werden. Nebenbei wurde auch noch das Verkabelungssystem, mit welchem die einzelnen elektronischen Bauteile miteinander verbunden sind, vereinfacht. Die Arbeit am Roboter geht so deutlich leichter von der Hand.
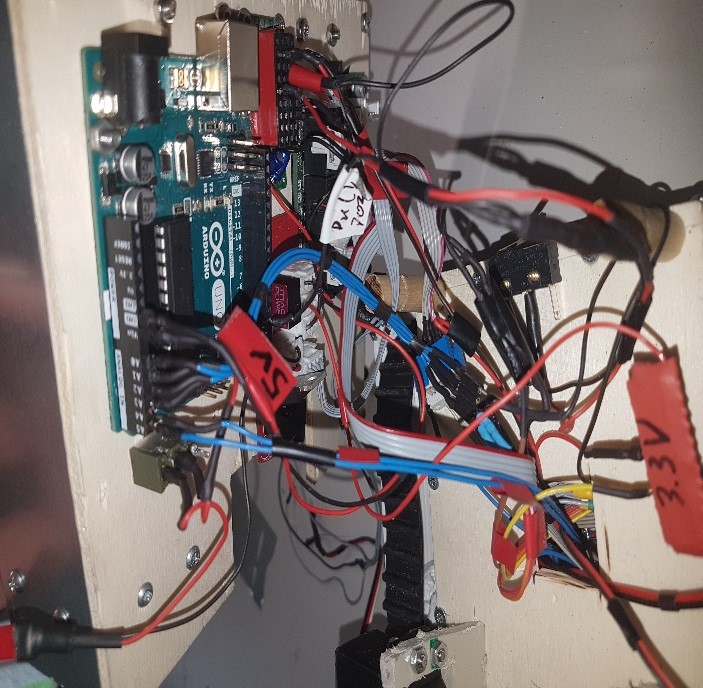
Verkabelungssystem des Challenge-Roboters

neues Motorboard des Challenge-Roboters
Februar 2018, Challenge-Team: Roboter fertig verkabelt, Line Follower funktioniert
Neben dem langersehnten 24h-Wettbewerb am 10. und 11. Februar hat das Challenge-Team natürlich auch an seinem Roboter weitergebaut. Viel Zeit bleibt ihnen nicht mehr: bereits Mitte April steht mit den Austrian Open der grosse Wettbewerb des Teams an.
Die Mechanik hat im Februar das Ballaufnahmesytem für die Montage vorbereitet und das Raupensystem verbessert. Die Raupen wurden geölt und von den Antriebsrädern wurde einiges weggeschliffen. Vom Ballfangarm wurden zwei Teile mit ABS ersetzt, da das Holz den Belastungen nicht standhalten konnte. Zusätzlich wurden zwei Mikrotouchschalter gelötet und modifiziert. Anstelle mit einer kurzen und geraden Aluminiumplatte wurde der Schalter mit einem aus einer Aluminium Platte selbst ausgeschnittenem Plättchen bestückt. Dieses Plättchen ist deutlich länger, womit dann auch der Schalter früher gedrückt wird. So kann der Touchsensor weiter hinten im Roboter eingebaut werden. So wird der Roboter deutlich kompakter und das Ballaufnahmesystem kleiner und leichter.
Bei der Software wurde der Line Follower fertiggestellt, welcher nun einer eigens abgesteckten und anspruchsvollen Teststrecke folgen kann. Somit wird er den Anforderungen des Teams gerecht. Zusätzlich können nun die Farbsensoren angesteuert werden. Der Roboter kann auch schon den Silberstreifen am Ende der Strecke erkennen. Auch das hohe Pfeifen der Motoren konnte mit der Erhöhung der Frequenz des PWM-Signals gelöst werden. Als nächste Hürde stehen die Speed Bumps an, welche der Roboter überqueren muss. Das Erkennen der grünen Flächen auf der Strecke muss noch im Code implementiert werden, damit der Roboter auch darauf reagieren kann.
Die Elektronik hat im Februar den Roboter fertig verkabelt und die Farbsensoren angeschlossen. Ausserdem wurde mit dem Zeichnen eines Motorboards begonnen. Die Verkabelung wurde sauber aufgeräumt und beschriftet. Somit werden Missverständnisse vermieden und auch die Informatiker haben bei der Verkabelung einen besseren Durchblick. Das Motorboard wird von Tiago mit Hilfe der AutoDesk Software gezeichnet. Nach längerem Testen kam man zur Erkenntnis, dass man die problembereitende silberne Fläche durch längeres Beleuchten doch erkennen kann. Das war der wohl erfreulichste Moment dieses Monats. Für die zusätzliche Beleuchtung wurde eine alte LED Platine des WM-Teams verbaut. Diese ist mit weissen LEDs bestückt. Die gute Einführung in die Eage-Software hat uns sehr geholfen. Im Moment bereiten die grünen Flächen noch Sorgen. Diese können fast nicht erkannt werden, da sie wohl zu viel rot enthalten. Dieses Problem kann jedoch vielleicht gelöst werden, indem die Blauwerte ausgelesen werden.
Februar 2018, WM-Team: 24h-Wettbewerb und Vorbereitungen fürs 2. Review
Am 10. und 11. Februar fand endlich der 24h-Wettbewerb statt. Mit 11 anwesenden Teams haben wir 24 tolle, interessante und vor allem kreative Herangehensweisen gesehen, um unsere verschiedenen Aufgaben zu lösen. Mit doppeltem Besuch des romanischen Fernsehens (RTR) konnten wir auch gute Werbung für unsere Sache machen und hoffen so, dass auch nächstes Jahr ein noch besserer Wettbewerb stattfinden wird.
Doch auch neben dem 24h-Wettbewerb liefen die Vorbereitungen fürs zweite Review am 10. März in vollem Gange. In der Mechanik wurde vor allem an einem höhenverstellbaren Dribbler gearbeitet. Dies war in den letzten Jahren immer wieder ein Problem, denn je nach Dribbler und Unterlage des Spielfelds gibt es da leichte Abweichungen, was zu einer unsauberen Kontrolle des Balles führt. Die Grundidee besteht darin, dass wenn der Ball in den Dribbler gelangt, der Dribbler hochgedrückt wird. Mit Hilfe von Federn wird der Dribbler, nachdem der Ball wieder weg ist, in seine ursprüngliche Position hinuntergedrückt. Für diese Konstruktion mussten neue Dribblerhalterungen gezeichnet und ausgeschnitten werden, zuerst aus Holz, danach auch aus Carbon. Das Ganze hat jedoch nicht so geklappt wie erwartet, denn der Dribbler klemmt manchmal und bleibt auch mal in einer schrägen Position stecken. Am Review werden da aber bestimmt einige Verbesserungsvorschläge gebracht. Neben dem neuen Dribbler wurden auch Löcher und Vertiefungen für die Montage der Liniensensor- und Ballsensorboards gemacht.
Bei der Software wurde an der Positionsfindung und einer Goaliestrategie gearbeitet. Das Programm für die Positionsfindung ist auf eine einseitige Einwirkung auf die Ultraschallsensoren erfolgreich getestet worden. Nun gilt es noch es auf die zweiseitige Einwirkung zu testen, ansonsten ist das Programm aber einsatzbereit. Die Goaliestrategie ist momentan noch in der Entwicklungsphase. Eine grundlegende Strategie, nämlich ein direktes Anfahren des gegnerischen Tors, funktioniert bereits. Jetzt wird an einem groben Konzept gearbeitet, welche das Entscheiden für die beste Anvisierung des gegnerischen Tors ermöglichen soll.
Im Bereich der Elektronik wurde weiterhin an den neuen Motoren gearbeitet. So wurden bei den Hallsensoren Pullup-Widerstände eingesetzt, wodurch die Signale nicht mehr so stark rauschen. Auch der Motor läuft so besser. Als nächster Versuch steht das Einsetzen von Induktivitäten bei den Phasen an. Die Liniensensoren wurden in den neuen Roboter eingesetzt und funktionieren sehr gut. Es gibt sehr grosse Wertunterschiede zwischen grün und weiss. Das bedeutet, dass wir die Linien sehr wahrscheinlich mit grosser Zuverlässigkeit erkennen können. Es besteht auch die Chance, dass wir die schwarzen Torraumlinien erkennen können. Die Linienerkennung muss aber noch bei schnellem Fahren getestet werden.
Januar 2018, Challenge-Team: Und nochmals ein Line Follower…
Nach den wohlverdienten Weihnachtsferien bereitete sich das Challenge-Team weiterhin für die Austrian Open, welche im April in Linz/AU stattfinden werden, vor.
Bei der Mechanik konnte der grösste Teil des Roboters fertiggestellt werden: Er kann nun mit der Elektronik bestückt werden. Die Grundplatten wurden aus einer Holzplatte gefräst. Der Grund ist, dass Holz zum einen leichter als der von uns verwendete Kunststoff ist und zum anderen besser für die Verarbeitung geeignet ist. Einzig die Verbindungsstellen, welche die Servos halten und die untere mit der oberen Platte verbinden, wurden aus Kunststoff angefertigt. Beim Aufladesystem der Bälle gab es einige Probleme. So darf die Verbindung von den Servos zum System nicht direkt sein, da sonst bei jeglicher asynchronen Drehung der Servos die Schaufel auseinanderbrechen würde. Um dieses Problem zu lösen wurde zunächst eine Verbindung zu den Servos erstellt, welche danach an der Schaufel befestigt wird.
Die Software hat im Januar den Line Follower neu geschrieben. Der Grund dafür waren die Korrekturwerte: Bei geringem Korrekturwert würde der alte Line Follower geradeaus über die Ecken fahren, bei etwas höherem Wert könnte er jedoch einer geraden Linie nicht mehr folgen, da der Roboter zu schnell werden und so die Linie verlieren würde. Mit der Hilfe eines älteren Mitglieds konnte ein neuer Line Follower entwickelt werden. Dieser war dann zwar deutlich besser als der Vorherige, er konnte aber immer noch keiner Ecke folgen, da ein Sensor immer von der Linie abkam. Momentan ist deshalb wiederum ein neuer Line Follower in Entwicklung. Dieser baut auf den Ideen der vorherigen Version auf, soll jedoch das „Eckenproblem“ lösen.
Das Elektronikteam hat im ersten Monat des Jahres ein defektes Powerboard repariert und ein weiteres fertiggestellt. Mit der Software wurde ausserdem an Lösungsvorschlägen getüftelt und verschiedene Arten von Lichtsensoren an verschiedenen Oberflächen getestet. Mit diesen Tests wollte man herausfinden wie gut jene Lichtsensoren verschiedene Materialien erkennen können und wie nützlich diese dann fürs Team sind. Zusätzlich wurde das neuste Teammitglied in verschiedenen Löttechniken geschult, wie zum Beispiel dem Löten von Widerständen an Platinen. Auch das Erstellen von Schaltplänen für Platinen auf der von uns benutzten Software wurde geübt. Neben diesen grösseren Aufgaben wurden auch Kleinigkeiten erledigt, wie das Anfertigen von Steckern oder das Reparieren von Kabeln.
Natürlich hat auch das Challenge-Team kräftig an den Vorbereitungen für den 24h-Wettbewerb mitgeholfen, welcher am 10. und 11. Februar stattfinden wird.