Donnerstag
Nach der Vollendigung des Packens gingen wir frohen Mutes auf den Zug nach Inssbruck. Die Reise verlief ereignislos und am frühen Nachmittag waren wir bereits eingetroffen und konnten uns an die Arbeit machen. Leider detektierten wir alsbald verschiedene Defekte an den Soccerrobotern des WM-Teams. Entsprechendwurde der Arbeitsplatz sofort eingerichtet und troubleshooting an allen Ecken und Enden begonnen.
Bei dem Rescue Line Team funktionierte die Linienfolge wie geplant und auch das Rescue Maze Team war fahrbereit.

Vor einem langen Abend genossen wir dann noch einen ausgezeichneten Hamburger in einer nahen Burgerbude.
Freitag
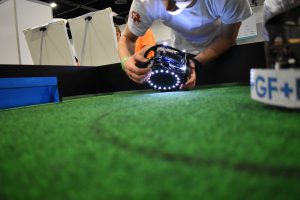
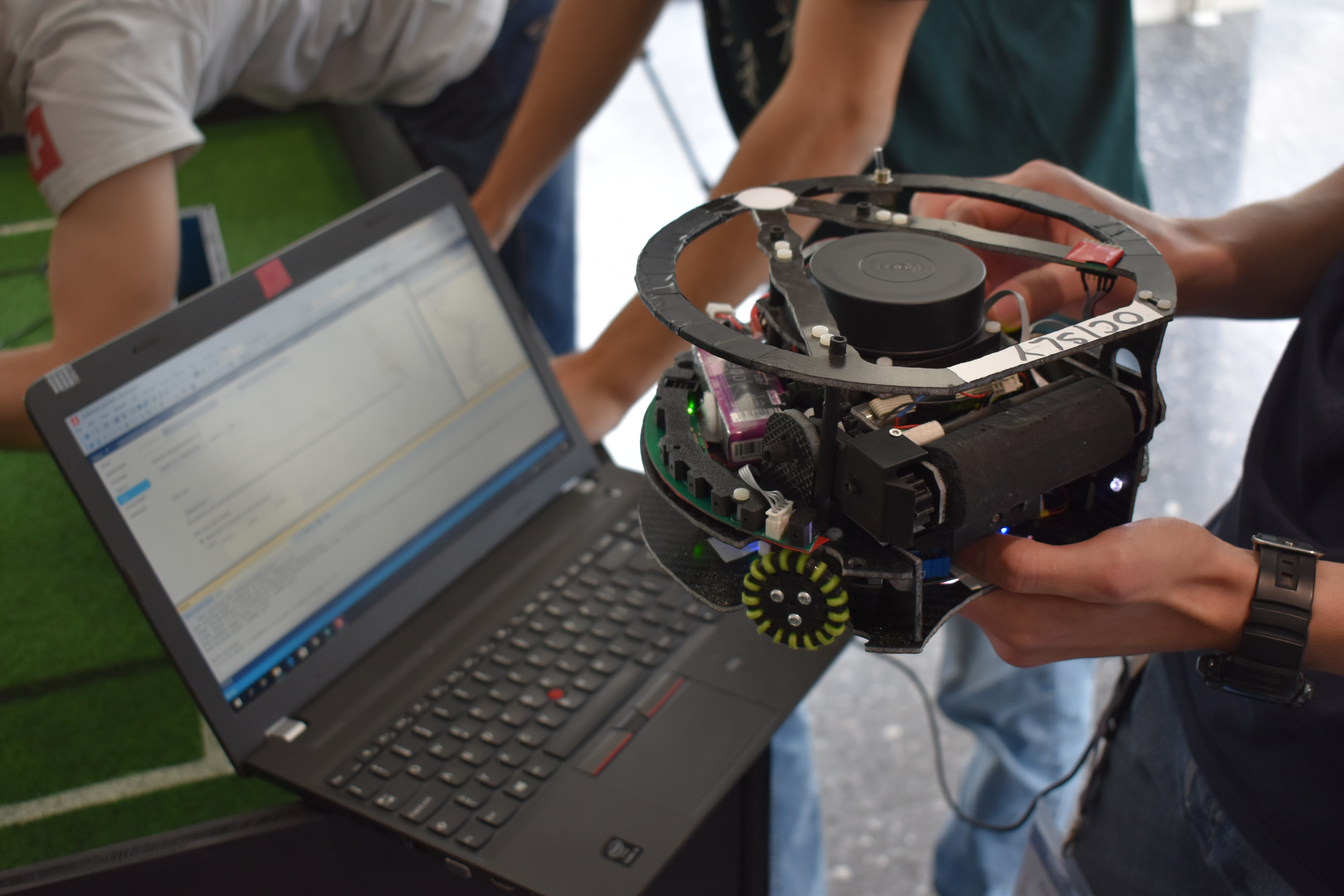
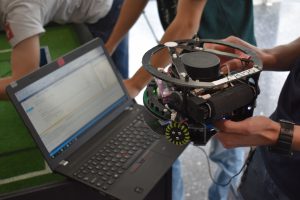
Zum ersten Spiel konnte das Soccer Team noch nicht antreten, da bei beiden Robotern das Antriebssystem nicht funktionierte. Auf den zweiten Match konnte der Erste Roboter dann hergerichtet werden und wurde als Goalie eingesetzt. Er erzielte auch noch ein paar Tore in dem Match. Das Endresultat war 11:3.

Mit Hochdruck arbeitete das Team am zweiten Roboter während die beiden Rescue Teams sich um die Wertungsläufe kümmerten. Diese verliefen am
ersten Tag für das Line Team zuerst enttäuschend, beim zweiten Lauf konnten 50 pkt erzielt werden, indem das Arduino überlistet wurde.
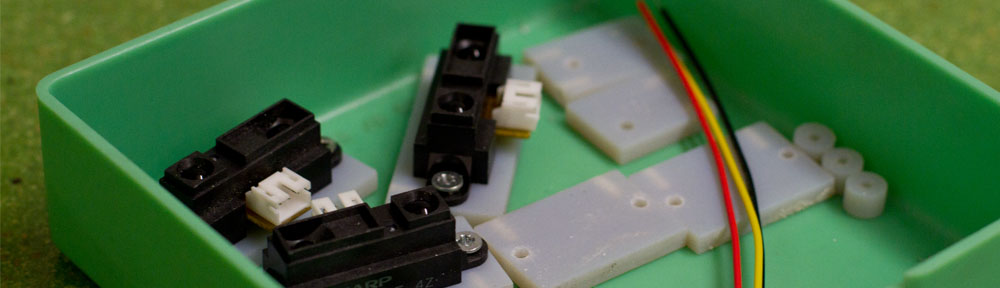
Das Maze Team hatte aufgrund der inkonstaten Distanzsensoren auch Mühe im ersten Lauf, erzielte aber 10pkt. Im zweiten Lauf verabschiedete sich unglücklicherweise das Fahrsystem, weshalb dieser keine Punkte brachte.
Für das Soccer Team standen noch zwei weitere Matches an. Im zweiten waren wir dem slovakischen Team klar unterlegen. Für das dritte Spiel ging es wieder in eine leicht ausgeglicherene Partie mit nur dem Goalie. Das Spiel endete mit 8:3.
Nach stundenlangem Fehlersuchen und der Vernichtung eines Mainboards, welches aus unerfindlichen Gründen einen Kurzschluss hatte, ging der Tag dem Ende entgegen.
Wir entschieden uns in die Stadt zu fahren für ein lokales Gericht. Nach etwas suchen fanden wir dies auch und speisten köstlich.
Samstag
Der Samstag und letzte Wettbewerbstag verlief noch mit je einem Wertungslauf für die Rescue Teams und einem Spiel für das Soccer Team. Für das Spiel konnte endlich auch der zweite Roboter fahrfähig gemacht werden, musste jedoch mit einer sehr einfachen Stürmerstrategie spielen, da das Toubleshooting alle Zeit für Kalibration gestohlen hatte. Nachdem die Motoren des Gegners aufgrund eines Defektes begannen zu überhitzen mussten sie ein gut verlaufendes Spiel leider nach der ersten Halbzeit aufgeben.
Das Line Team konnte die Leistung vom Vortag nicht mehr toppen und erreichte im letzten Lauf 20pkt. Das Maze Team konnte sich zum Vortag noch einmal steigern und konnte ebenfalls 20pkt erreichen. Unglücklicherweise hatten auch diese Teams mit defekten zu kämpfen, so stieg dem Maze Team der Servo für das Abwerfen der Pakete aus, das Line Team kämpfe mit inkonstanten Liniensensoren.


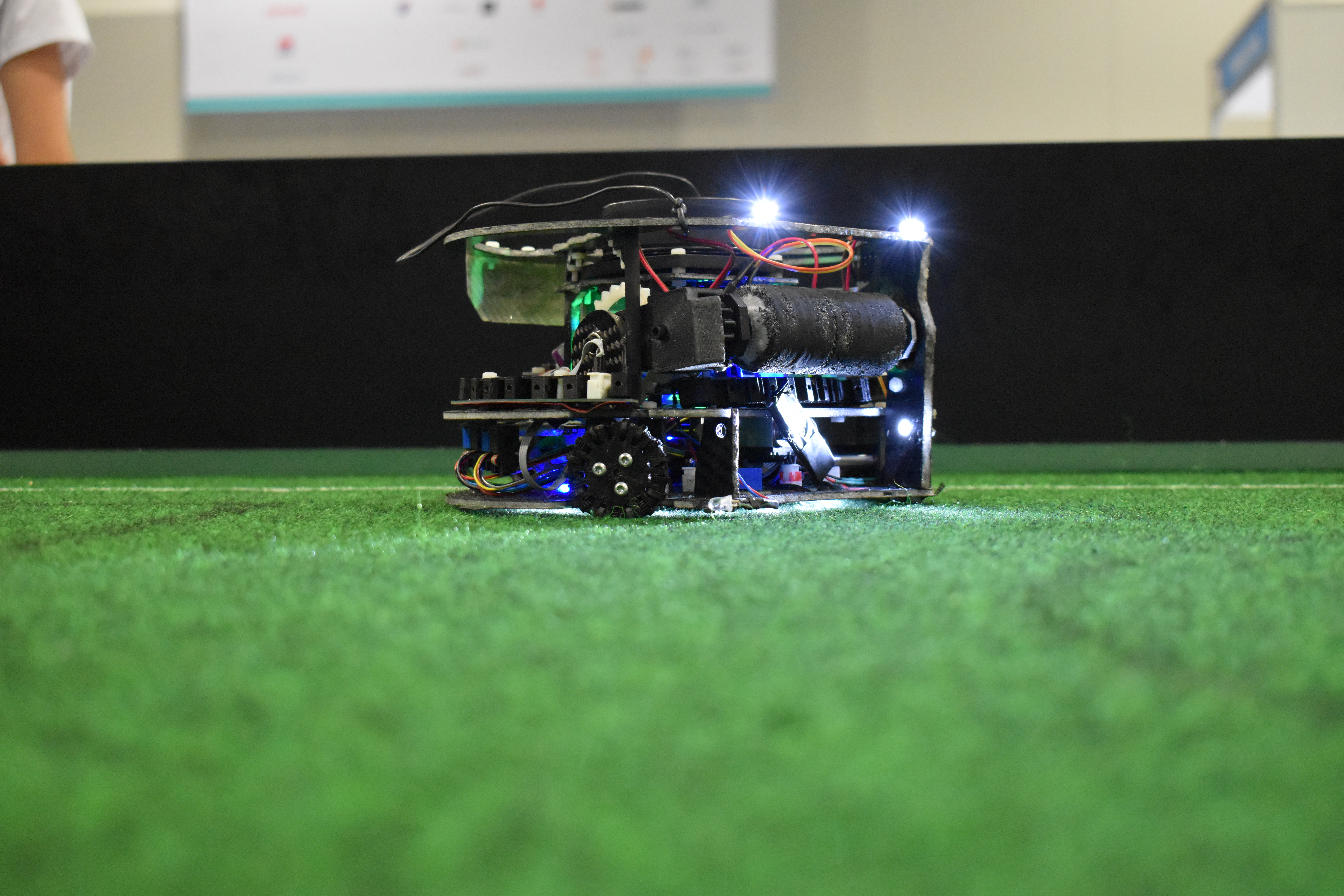
 Die Chance auch „die Grossen“, also Major League, Spiele zu sehen sorgte natürlich auch ein wenig für Inspiration und das Verlangen, genauso coole Roboter zu bauen.
Die Chance auch „die Grossen“, also Major League, Spiele zu sehen sorgte natürlich auch ein wenig für Inspiration und das Verlangen, genauso coole Roboter zu bauen.