In diesem Monat hat ein Helveticrobot an der Robocup Junior Soccer Sim Demo teilgenommen. Dies war ein virtueller durchgeführter Wettkampf, bei dem die Teams ihre Codes einschicken mussten. Für Helveticrobot war das eine gute Möglichkeit das Programm zu testen und daraus Verbesserungen für die Version für den Sommer zu finden. Nebenbei arbeiteten auch Elektronik, Mechanik und das Challenge-Team fleissig weiter.
Software
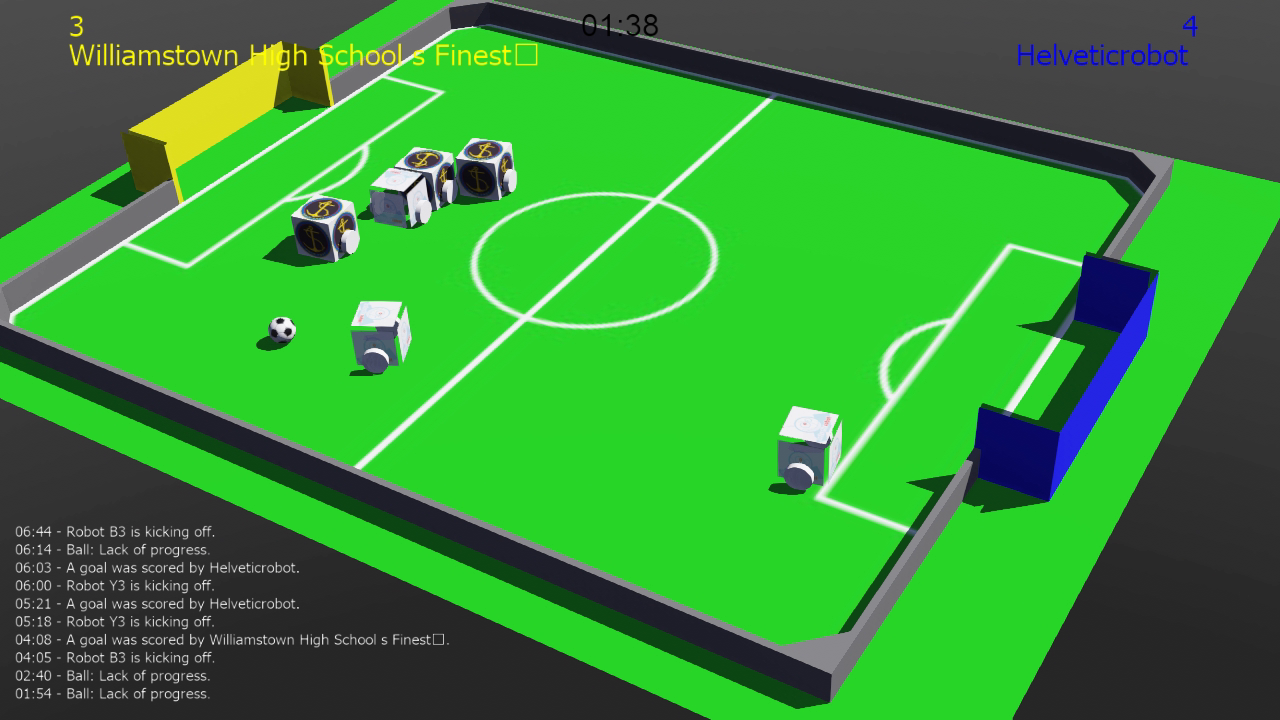
In diesem Monat wurde das Programm für den simulation soccer fertiggestellt und eingereicht.
Bedauerlicherweise ist unser Team aufgrund eines unglücklichen Gegentreffers frühzeitig
ausgeschieden.
Des weiteren hat Anna-Chiara die Liniensensoren getestet woraufhin wir nun mit dem Testen der
Sensoren fertig sind.
Zu guter Letzt haben wir uns das Skript vom goalie genauer angeschaut und haben festgestellt, dass
wir einiges überarbeiten müssen. Darauf werden wir uns im nächsten Monat fokussieren.
Elektronik
Die Elektronik hat im Februar gelernt, wie man die Kabel krimpt und herstellt, damit die Elektronik für den WM-Roboter eine sichere und zuverlässige Kabelverbindung zwischen den einzelnen Platinen herstellen kann. Mit genau solchen Platinen, genauer gesagt mit den Lichtsensor Platinen, hat die Elektronik sich in diesem Monat genauer beschäftigt und begonnen, solche zu löten, damit unser Team Ersatzplatinen hat, falls eine oder mehrere kaputt gehen sollten.
Mechanik
In diesem Monat hat die Mechanik mit den Bestellungen begonnen. Dabei musste sich die Mechanik erst einmal Gedanken machen, was sie den genau für Material benötigt. In diesem Schritt hat sie zudem etwas über die Zusammensetzung, Eigenschaften und Verwendung verschiedener Materialien wie zum Beispiel CFK gelernt. Hiernach konnte sie dann das Material bestellen.
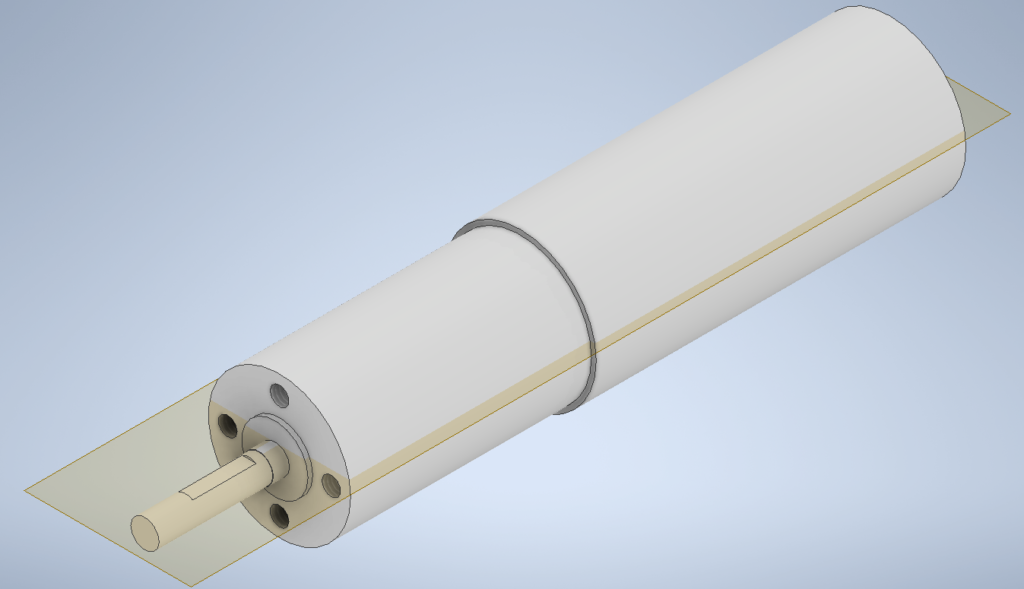
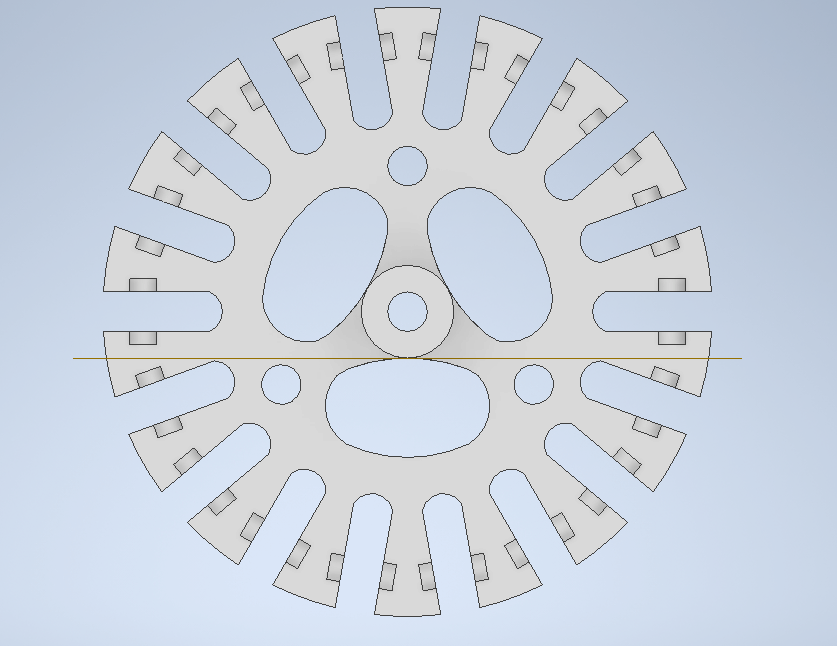
Des Weiteren hat die Mechanik mit dem physischen Bau einzelner Teile des Roboters begonnen. Ein Beispiel dazu sind die Felgen für die Subwheels. Die Subwheels sind diejenigen Räder, die an der Aussenseite des Omniwheel senkrecht zu deren Laufrichtung befestigt werden und somit eine Bewegung in alle Richtungen ermöglichen. Diese Subwheelfelgen hat die Mechanik aus Aluminium selbst an der Drehbank geformt. Um mit dieser Maschine umzugehen hat sich die Mechanik bei dem technischen Dienst der Bündner Kantonsschule Hilfe in Form einer Einführung geholt. Die Mechanik experimentiert momentan noch an den idealen Subwheelfelgen, wird aber bald im grossen Stil produzieren können.

Challenge-Team
Im letzten Monat haben wir mit unserem Prototyp aus Holz weitergearbeitet. Für die Motoren haben wir immer noch keine abschliessende Lösung gefunden.
Gian-Reto hat sich noch mal mit uns getroffen und uns mit den Farbsensoren und den Motorboards geholfen. Wir wissen jedoch noch nicht genau welches Motorboard wir schlussendlich verwenden werden.
Damit wir bereits weitermachen konnten, hat David angefangen ältere Farbsensoren zu reparieren, damit wir diese verwenden können.
Wir haben auch mit dem Pi-Bot weitergearbeitet und unseren Linienfolger weiter verbessert.
Ausserdem haben wir uns dafür entschieden Lithium-Ionen-Akkus zu verwenden. Dadurch sollten wir weniger Probleme mit den schwankenden Batterieladezuständen haben.