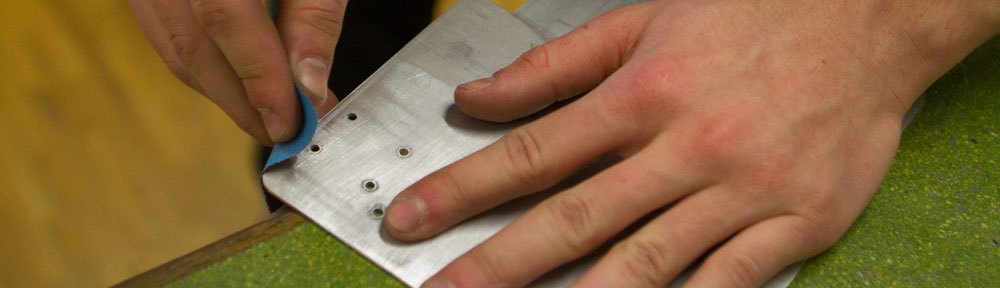
Software: Neue Libraries und Einführungen für den Nachwuchs brauchen Zeit
Diesen Monat haben wir uns vor allem auf das Fertigstellen von wettbewerbsfähigen Robotern konzentriert. Aus diesem Grunde haben wir nicht essentielle Teilprojekte wie die Ansteuerung des Linearmotors und des Maussensors vorerst bei Seite gelegt.
Für das neue Mainboard mit einem ARM Prozessor (der Programmer dafür ist glücklicherweise zügig angekommen) mussten wir fast alle Low-Level-Libraries anpassen und/oder zu grösseren Teilen neu schreiben. Dies verursacht zwar viel Arbeit, aber wir sind gut vorangekommen: Wir haben mittlerweile funktionierende UARTs (auch über Bluetooth), I2C-Kommunikation, genaue Zeitmessung samt periodischem Aufrufen von Funktionen und natürlich Steuerung von GPIOs. Nun bearbeiten wir das SPI sowie die Steuerung von Flash und wenn dies erledigt ist, können wir uns dem Ausarbeiten von Strategien widmen.
Weiterhin finden auch die Wettbewerbe der Nachwuchsteams bald statt und wir haben ziemlich viel Zeit dafür verwendet, Einführungen in spezifische Themen zu geben oder beim Finden von Fehlern zu helfen.
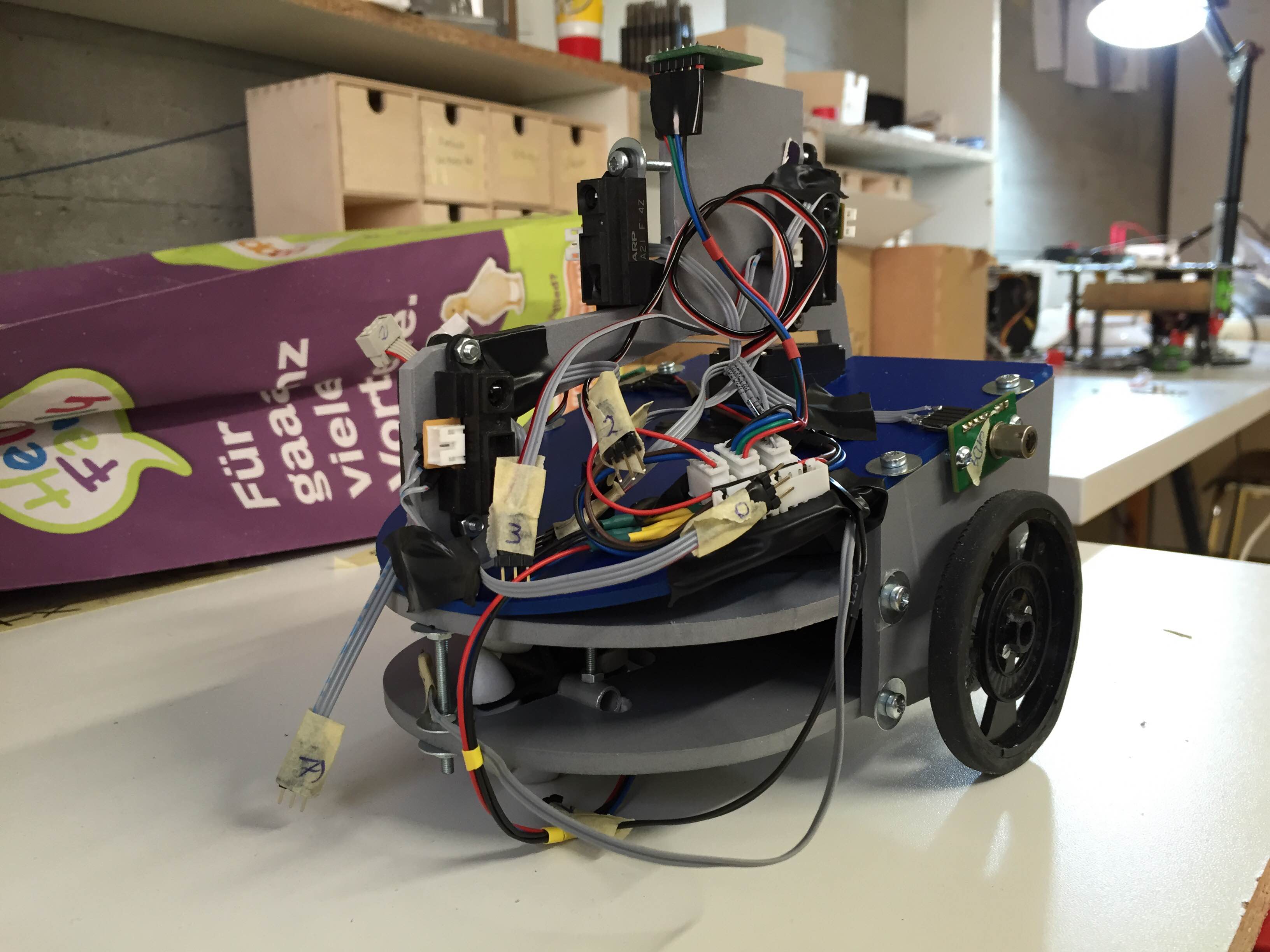
Es stellte sich weiterhin das nicht zu unterschätzende Problem, die Kabelführung sowie die Anordnung der Sensoren zu optimieren. All die Kabel können sich nämlich zu einem relativ hohen Gewicht summieren, weshalb es ein guter Ansatz ist, bei ihnen an Gewicht zu sparen, da man dadurch keine Funktionalität verliert. Wir legen weiterhin grösseren Wert darauf, strukturelle Schwachpunkte in den Kabeln zu vermeiden.
Der Platz auf der unteren Platte ist recht knapp, da man dort die Räder und Motoren befestigen, die IR-Photodioden zur Ballerkennung anbringen und die Sensoren zur Erkennung der Spielfeldbegrenzung anbringen muss und all diese Dinge am besten weit aussen, sich nicht in die Quere kommen und möglichst leicht zugänglich sein sollten.
Mechanik: Bald steht der fertige Roboter
Diesen Monat haben wir uns in der Mechanik, vor allem am physischen Teil gewidmet. Es wurden sehr viele Teile ausgeschnitten, neue Räder gemacht und das Konzept und die Baulinien immer wieder neu besprochen und zusammengefügt. Die Zeit, wo man einigermaßen selbständig vorankam, war diesen Monat unterbrochen. Wir konnten viel Zeit und Schweiss im Team verbringen und haben auch das durchsichtige Band des Teamworks gestärkt. Durch Thementage und wenigen Prüfungen konnten wir sehr viel Zeit in die Roboter invistieren. Dadurch sind wir einen grossen Schritt näher an den definitiven Robotern gekommen.
Unteranderem wurde an der Konstruktion des Dribblers gefeilt. Durch Gian Jörimann, wurden uns neue Zahnräder zur Verfügung gestellt. Einerseits aus Plexiglas und andererseits aus Holz. Florian Schäfer arbeitet noch daran um uns mit seinem selbstgebauten 3D-Drucker Zahnräder zu drucken, welche wir auch in unsere Mängel nehmen können. Vielen Dank den Herren!
Ebenfalls sind neue Motoren von unserem Sponsor Faulhaber eingetroffen. Es fühlte sich wie ein zuvorkommendes Osterfest an, als wir die tollen Neuheiten sehen konnten. Danke Faulhaber!