Unsere frischgebackenen Challenger haben ihre erste Schritte zum Fertigstellen des Roboter gemacht.
Mechanik
Wir Neumechaniker der Rescue A erhielten an einem Samstagnachmittagunsere erste Einführung ins CAD zeichnen. Wr lernten als allererstes 2DSkizzen zu erstellen und diese danach zu den gewünschten dreidimensionalen Objekten weiter zu verarbeiten. Zuallererst standen
wir an jeder möglichen Ecke an, doch was zuerst nur grobe, klobige
Klötze waren, wurde bald etwas exakter und mehr der Vorstellung
entsprechend. Um weitere Übung zu erhalten, begannen wir Objekte wie
Pingpongschläger abzuzeichnen. Gegen Abend lernten wir noch, wie man
verschiedene Bauteile zu einem vollendeten Roboter zusammensetzen kann
und wie man Pläne herstellt aus welchen danach mit Material gebaut
werden kann. Nun heisst es weiterhin fleissig üben und langsam erste
Ideen für unseren Roboter sammeln.
Nicht zu vergessen ist natürlich, dass wir unser Zimmer aufräumten und
die Legos nun für ein Jahr beiseite stellen bis sie von den nächsten
Newcomern wieder genutzt wird.
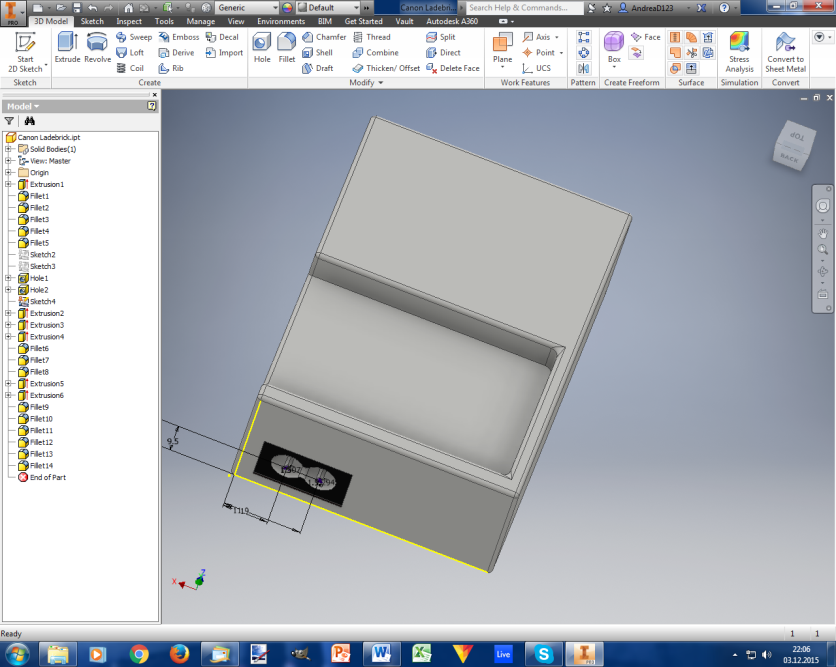
Bescheidener, unvollendeter Versuch meinen Fotokamera-Ladeadapter zu zeichnen.
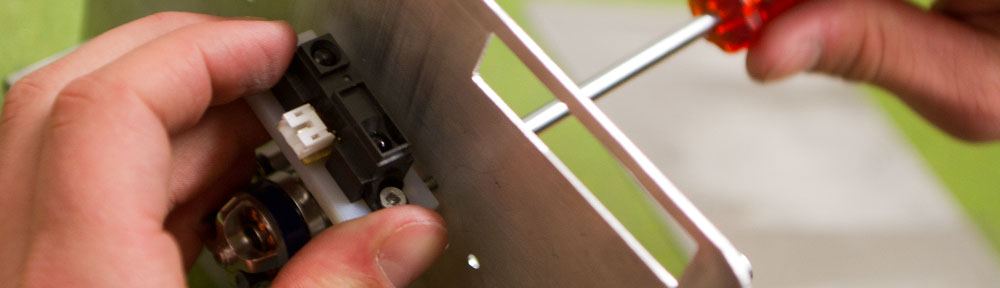
Programmierung
Unsere Aufgabe wird es sein, ein „zerstörtes Gebäude“ zu durchqueren und im letzte Raum Opfer in Form von reflektierenden Bällen zu retten. Bis jetzt haben wir geschaut, wie in ungefähr unser Roboter funktionieren sollte und welche Sensoren und Motoren wir dazu benötigen. Das Ansteuern der Sensoren und Motoren wird eine grosse Herausforderung für mich sein, da dies nicht mehr so einfach ist wie bei den Lego-Roboter. Deshalb wird meine erste Aufgabe sein, mich in die Thematik reinzulesen, wie man sich das ganze Vorstellen kann. Ausserdem sollte ich mir überlegen, wie ich diverse Sachen handhaben möchte, wie zum Beispiel das Umgehen eines Hindernisses, die Lokalisierung der Evakuierungszone oder den Übergang vom Linenfolger zur Endzone. Im Endeffekt habe ich noch nichts Sichtbares erreicht, aber in dieser ersten Phase wird es wichtiger sein Informationen zu sammeln und sich Gedanken zur Umsetzung machen.