Elektronik
Wir konnten neue Ballsensorenboard designen, welche sich auch gut mit der Mechanik übereinstimmen konnte. Zudem haben wir uns den Lichtsensoren gewidmet, welche ein völlig neues Design dieses Jahr bekommen. Wir konnten in China uns mit anderen Teams austauschen und kamen auf eine gute Idee, indem wir mehrere Lichtsensoren auf einer Platine aneinanderreihen. Dies sollte uns das Erkennen der Linien am Boden erleichtern und eine schneller Reaktion des Roboters auf die Linien ausmachen.
Programmierung
Das Problem mit dem nicht präzise fahrenden Roboter konnte gelöst werden, unsere Befürchtungen, dass es an einem tiefgreifenden Fehler im Code liegt, stellte sich zu Glück als Falsch heraus. Deshalb konnte das Problem gelöst werden nach langem herumspielen mit den Einstellungen. Zudem schalteten wir beim Mainboardprojekt den Watch Dog Timer ein. Dieser kann man mit einer Totmanneinrichtung vergleichen, dass heisst wenn der Prozessor einen von ihm unabhängigen Countdown nicht alle 3 Sekunden zurücksetzt, dann neustartet dieser den Prozessor. Damit hoffen wir uns, dass unser Roboter stabiler funktionieren wird während einem Spiel und wir ihn somit weniger aus dem Feld nehmen müssen. Solche Probleme treten eigentlich nur selten auf aber wir glauben, dass eben auch diese selten Fälle sehr entscheiden für ein Spiel sein können. Diese Änderung hat auch zu einem grossen Umstrukturierung des Codes bevor sich der Roboter bewegt geführt, da man nicht zwischen einem „normalen“ Neustart und einem WDT Neustart unterscheiden kann und das Ziel bei einem „normalen“ Neustart ist, dass er wartet bis man auf einen Knopf drückt und bei einem WDT Neustart soll er sofort los fahren.
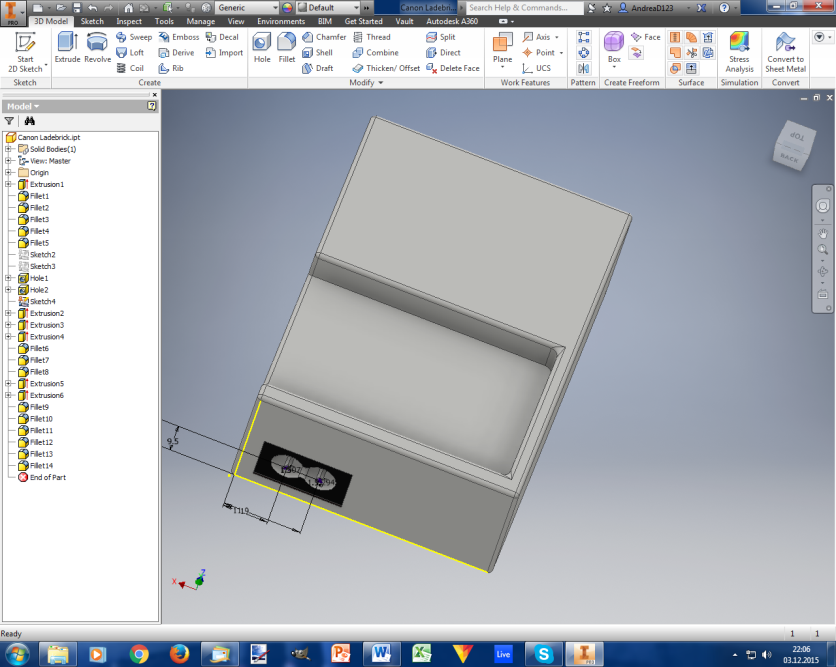
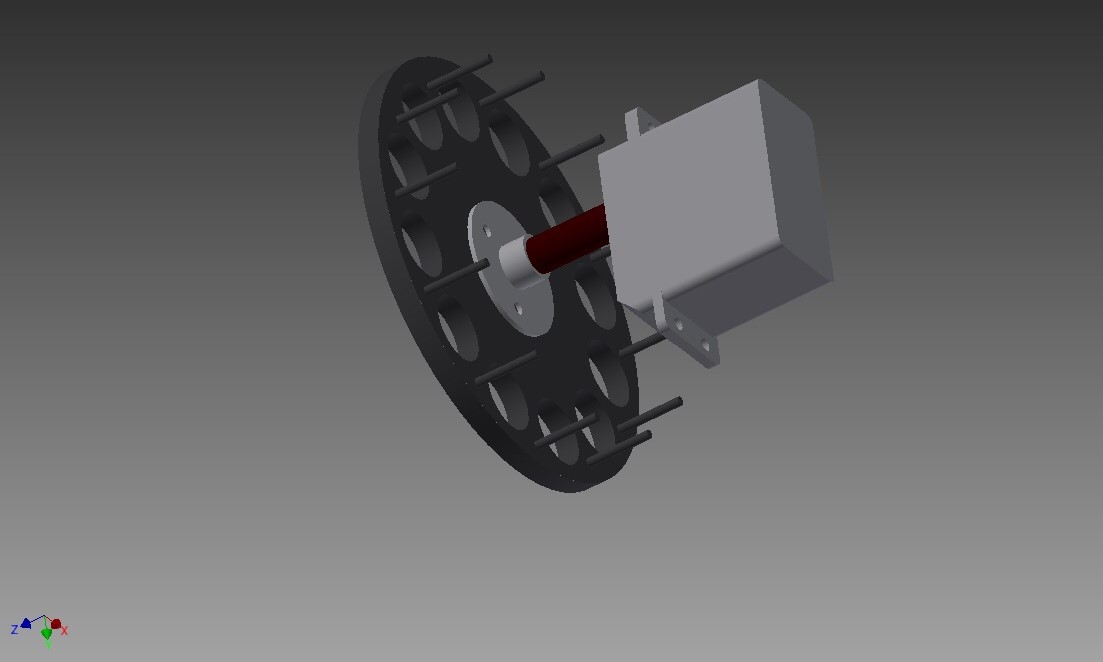
Mechanik
Wir haben uns intensiv mit der Zeichnung des CAD’s gewidmet. Während wir ein paar komplett neue Teile erbaut haben, wie die Lichtsensoren, haben wir zudem einen Einblick in die Zeichnung von der Elektronik bekommen. Wir konnten dadurch eine genauer Zeichnung erstellten, der verschiedenen Platinen. Zudem kam die Diskussion auf, wie wir die mittlere Platte mit der Oberen verbinden. Eine Idee war, mit vielen Stäbchen. Die Idee wird jedoch noch Überdenkt.