Software
Nachdem wir im Februar den I2C-Fehler beheben konnten, stellten wir fest, dass die Positionserkennung des Balls nicht richtig funktionierte. Nach langwierigem Debugging konnten wir einen Fehler finden. Die Referenzspannung für den ADC war zu niedrig, sodass der ADC nur extrem hohe, oder extrem tiefe Werte ausgab und die Distanzumrechnung so verfälscht wurde. Nachdem wir die Referenzspannung angepasst hatten, funktionierte die Distanzerkennung immer noch nicht. Zwar konnte man die ungefähre Distanz des Balles erkennen, doch waren die Werte extrem ungenau, was dazu führte, dass der Roboter die Position des Balles überhaupt nicht einordnen konnte. Dies liegt daran, dass der ADC nicht immer alle Signale eines Pulses erkennt und sich die Infrarotlichteinstrahlung stark mit der Orientierung des Balls ändert, auch wenn dieser an derselben Stelle ist. Wir haben dann die Anzahl Samples erhöht. Jetzt konnten wir den Ball endlich einigermassen gut erkennen, auch wenn die Messung immer noch etwas ungenau war. Doch dabei stellte sich aber auch schon das nächste Problem. Aufgrund der hohen Anzahl Samples wurde das ganze Programm sehr langsam. Wir werden jetzt aber neue op-amps kaufen, die wesentlich schneller sind. Wir hoffen, dass wir so die Anzahl Samples verringern können, ohne Einbusse bei der Genauigkeit zu erfahren.
Elektronik
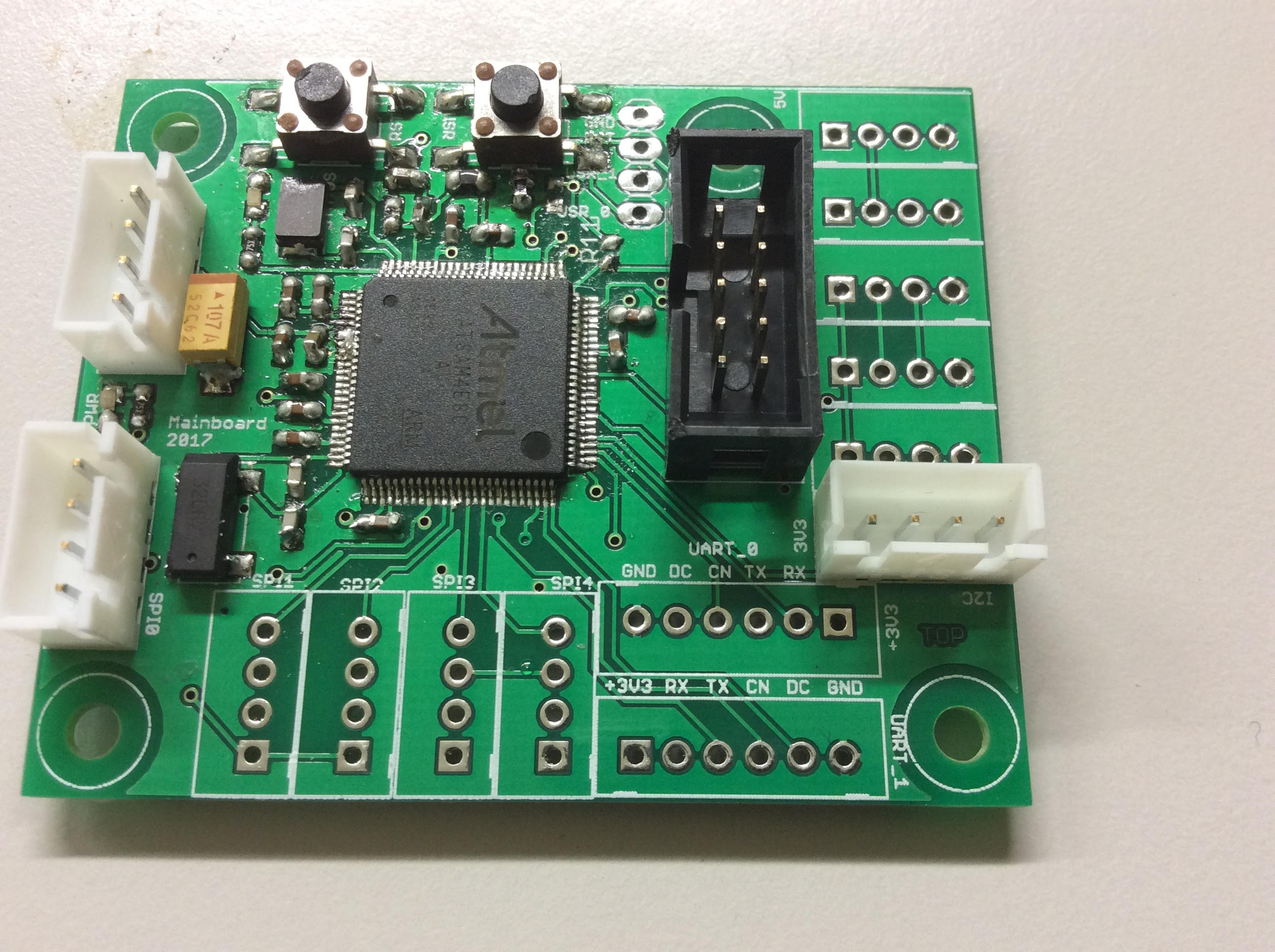
Ich habe das Mainboard zusammengelötet und je ein Ballsensorboard die Slaves rechts und links, wie auch ein Master-Ballsensorboard. Die Ballsensorboards funktionieren ohne Probleme. Bei dem Mainboard hat es einige Probleme gegeben. Man konnte es zwar programmieren, doch es hat das Programm nicht ausgeführt. Ausserdem war der Flash Erase immer auf 1V. Wir haben es mit anderen Pulldown Widerständen versucht, doch schlussendlich hat sich herausgestellt, dass das Board Lötfehler hatte. Als diese behoben wurden funktionierte es.
Mechanik
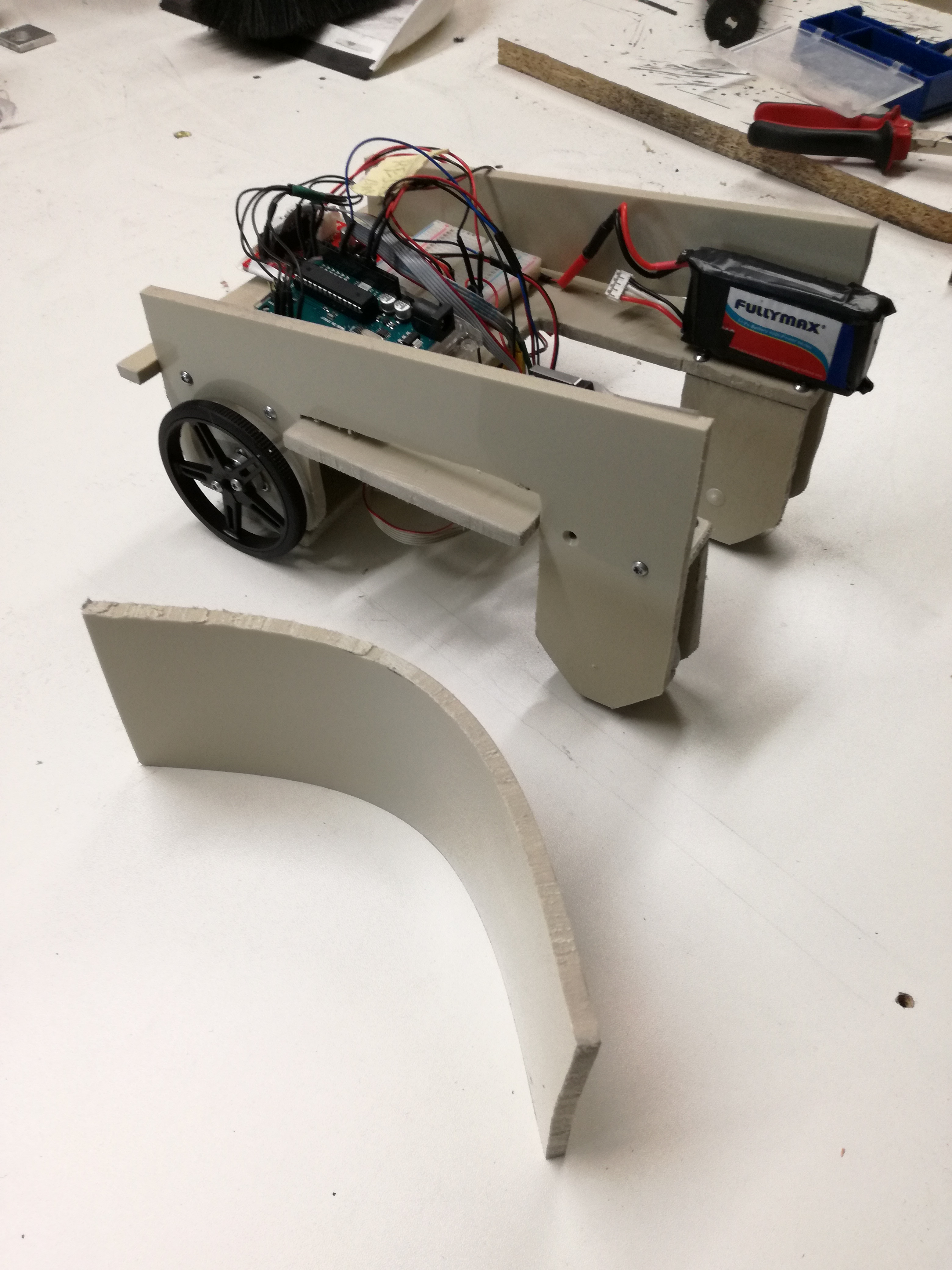
Im Monat März habe ich den zweiten Roboter zusammengebaut. Das ist zugleich das Einzige, was ich mechanisch an den Robotern gemacht habe, denn in diesem Monat standen vor allem administrative Dinge auf dem Plan. So habe ich überprüft, ob wir noch Zahnräder haben und die Richtigen rausgesucht. Ich muss jetzt nur noch schauen, ob wir allenfalls noch vor dem Austrian Open welche ausdrucken wollen, denn der Lasercutter wird bis nach den Frühlingsferien repariert. Wir werden aber wahrscheinlich einfach ein paar Alte benutzen.
Ausserdem habe ich mich weiter über Kunststoffschrauben informiert und viele weitere gefunden, welche mich aber noch immer nicht zufrieden stellen. Da ich aber keine Zeit zum Suchen mehr habe, werde ich wahrscheinlich einfach diese bestellen.
Mit der Hüllensuche habe ich auch begonnen und diese auch fast abgeschlossen. Ich muss nur noch die letzten Dinge, wie zum Beispiel die Dicke der thermoplastischen Platte, klären, werde aber diese auch ziemlich schnell mit den Kunststoffschrauben zusammen bestellen.
Leider bin ich nicht dazu gekommen Ersatzteile auszuschneiden. Das werde ich im April nachholen.