Dieses Wochenende findet erstmals der rein «virtuelle» bzw. «simulierte» Wettbewerb RoboCup Junior Soccer Sim Demo Competition statt. Dabei handelt es sich um eine Art «Proof-of-Concept» der simulierten Weltmeisterschaft im Sommer.
Matthaeus Goj und Lars Peder versuchten im Januar wettbewerbsfähigen Source Code für die Simulationssoftware Webots des EPFL Spin-off Cyberbotics Ltd. in der Sprache Python zu programmieren.
Trotz engem Terminplan und wenigen Discord-Sessions setzte man sich im Team als Minimalziel das Überstehen der Vorrunde.
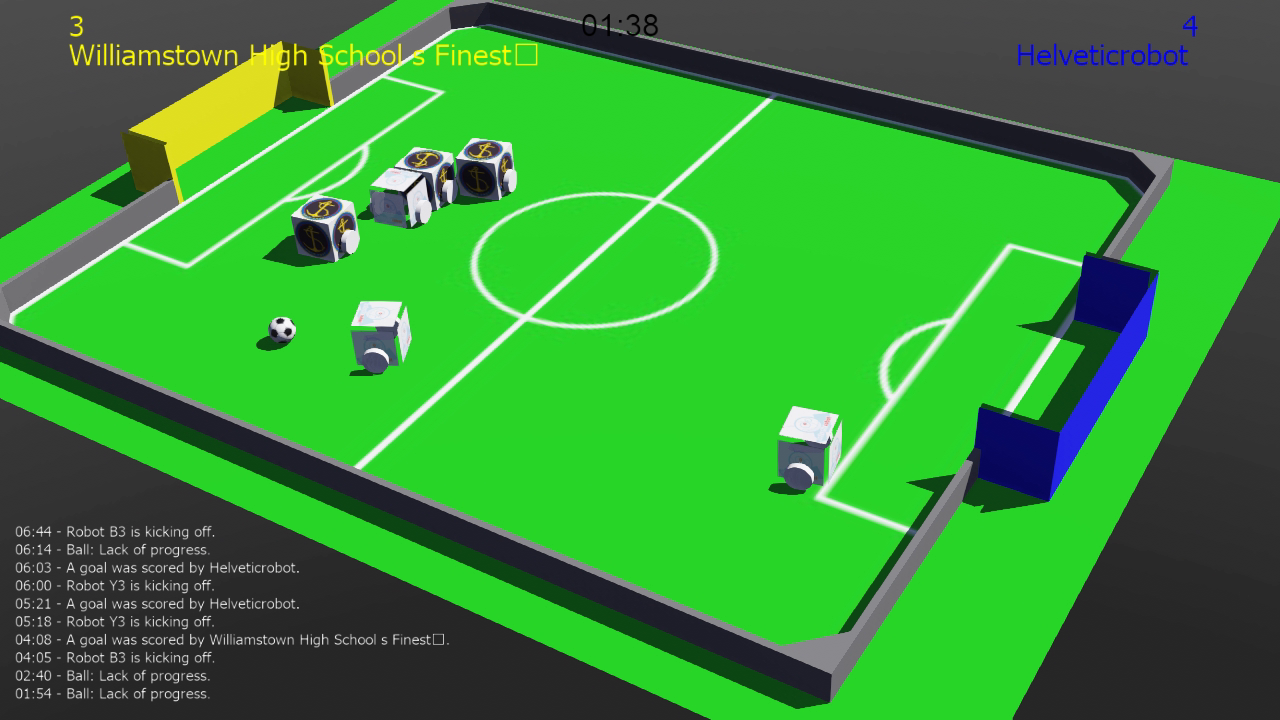
Helveticrobot startete in die Vorrunde in Grupe 8 gegen vier weitere Teams aus Australien, den USA, Mexico und der Slowakei.
Mit zwei Siegen und zwei Niederlagen aus den Gruppenspielen konnte sich Helveticrobot als Drittplatzierter in der Gruppe nicht für die Sechzehntelfinale qualifizieren. Der entscheidende Match gegen Williamstown HS’s Finest aus Australien ging sehr ärgerlich mit 6:7 (in der Halbzeit führte man noch mit 5:4) verloren.
Trotz grosser Enttäuschung will das Team die gemachten Erfahrungen mitnehmen und im Sommer an der Weltmeisterschaft mit verbessertem und optimierten Source Code antreten. Die Motivation ist nun umso grösser eine verbesserte Version im Sommer einzureichen.
Im Januar hat das WM-Team seine Arbeit wieder aufgenommen. Ende Januar hat Robocup bekannt gegeben, dass alle Events nur noch virtuell stattfinden. Dies wurde laut Robocup aufgrund der Unsicherheiten betreffend den Schutzmassnahmen vor der Pandemie beschlossen. Somit wird für die Wettkämpfe nur noch die Software benötigt. Helveticrobot hat aber entschieden, den Bau der Roboter trotzdem weiterzuziehen um Erfahrung zu sammeln und um eventuell einen kleinen internen Wettkampf durchzuführen.
Mechanik
In diesem Monat hat die Mechanik das CAD fertiggestellt. Zuerst hatte sie die fehlenden Teile von Ende November fertiggezeichnet. Dabei hatte sie Anfangs gewisse Schwierigkeiten die ideale Arbeitstechnik zu finden. Mit der Zeit hat die Mechanik aber ihre Arbeitsweise gefunden und konnte viel dazulernen. Die Zeichnung wurde dann mit den Ehemaligen besprochen. Diese haben der Mechanik gewisse Verbesserungsvorschläge gegeben, die sie direkt auch umsetzen konnte.
Des Weiteren hat die Mechanik an der Umsetzung in den physischen Roboter geplant. Anfangs hat sie sich Gedanken zum Material gemacht. Dabei musste sie sich zum Beispiel entscheiden wo sie Vollcarbon einsetzen will und wo sie lieber mit Carbon-Sandwich Platten arbeiten will. Ebenfalls hat die Mechanik mit einer Schätzung der Masse des Robos begonnen. Da dieser maximal nur 1.1kg wiegen darf, ist dies eine wichtige Aufgabe. Schliesslich hat die Mechanik die Lagerbestände an Material kontrolliert und daraus eine Bestellliste erstellt.
Elektronik
Die Elektronik hat im Januar zusammen mit der Mechaik besproochen, wo die verschiedenen Platinen auf dem neuen Roboter plaziert werden sollten. Ebenfalls hat die Elektronik sich mit der Kabelverbindung und der Kabelherstellung beschäftigt. Eine zuverlässige Kabelverbindung ist wichtig für den Roboter, damit die Kommunikation zwischen den einzelnen Platinen einwandfrei funktioniert.
Software
In diesem Monat hat das Softwareteam an zwei verschiedenen Projekten gearbeitet. Zum einen an unserem Roboter und zum anderen an der RoboCup Junior Soccer Simulation. Anna-Chiara hat sich mit den Liniensensoren beschäftigt. Sie hat die Funktionsfähigkeit getestet und die Verbindungen zu den anderen Boards. Nun muss nur noch getestet werden, ob es auch auf dem Feld bei voller Fahrt funktioniert. Matthaeus und Lars haben sich mit der Programmierung für die online Simulation beschäftig, in welcher es darum geht drei Roboter zu programmieren, die dann in einer Simulation gegen andere Roboter antreten werden. Wie das Ergebnis von diesem Projekt ausfällt, werden wir im Februar sehen. Im nächsten Monat wird es spannend, da wir uns mit Strategien beschäftigen.
Challenge-Team
Das Challenge-Team, unser Nachwuchsteam, konnte letzten November richtig durchstarten. Auch die Mitglieder dieses Teams arbeiten trotz virtuellem Wettkampf in allen Bereichen weiter:
Im letzten Monat haben wir mit einem Prototyp aus Holz begonnen. Da dieser momentan noch Schwierigkeiten mit den Motoren hat, arbeiten wir da noch an einer besseren Lösung.
Gian-Reto (Ehemaliger) war bei einem Treffen dabei und hat uns bei der Elektronik unterstützt.
Damit der Roboter bereits programmiert werden kann, wird ein Pi-Bot verwendet. Inzwischen konnten wir einen funktionierenden Linienfolger entwickeln, welcher relativ zuverlässig der Linie folgt.
Zurzeit gibt es noch Schwierigkeiten mit der Unregelmässigkeit beim Linienfolger: Je nach Batteriestand kommt es zu unterschiedlichen Ergebnissen mit einer grossen Spannweite. Das führt dazu, dass der Roboter unterschiedlich fest reagiert und deshalb die Spur verlieren kann.
Im November hat das WM-Team weiterhin fleissig gearbeitet und die Ziele für das erste Review mehrheitlich erreicht. Das Review ist ein Tag an dem die ehemaligen Helveticrobotmitglieder vorbeikommen, um die Arbeit des WM-Teams zu sehen, kontrollieren ob die Ziele erreicht wurden, einzelne Punkte zu besprechen und Verbesserungsvorschläge zu geben. Nun macht das WM-Team Weihnachtsferien bis Anfang Januar, um sich auf die Prüfungen der Bündner Kantonsschule zu konzentrieren und sich etwas zu erholen.
Bericht von Mechanik vom November
In diesem Monat hat die Mechanik weiterhin fleissig CAD gezeichnet.
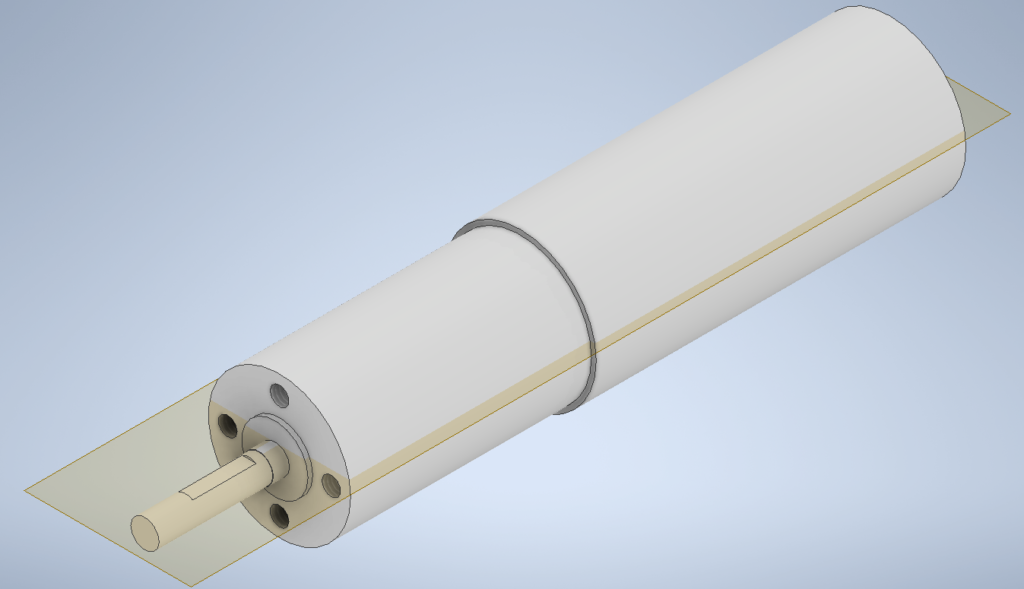
Die erste Tätigkeit der Mechanik in diesem Monat, war das Abzeichnen des Motors. Dies ging sehr schnell und leicht.
CAD des Motors
Danach konzentrierte sich die Mechanik auf das Grundgerüst für den Roboter und das Zusammenstellen des gesamten CAD’s. Um dies zu tun, mussten zuerst alle Teile gezeichnet werden. Diese waren, nachdem die Räder und Motoren schon gezeichnet wurden, noch die Sensoren und Boards. Da für die Mechanik nur die Dimensionen relevant sind, wurden diese Elektronikteile als Blöcke gezeichnet. Mit diesen Zeichnungen im Gepäck hat die Mechanik dann begonnen das Ganze in ein CAD einzupacken und parallel dazu das Grundgerüst zu erstellen. Da sie mit den beiden letztgenannten Punkten noch nicht ganz fertig wurde bis ende Monat, muss sie in den geplanten Weihnachtsferien noch etwas nacharbeiten.
Am ersten Review wurden gewisse Punkte wie beispielsweise die Räder und der Gesamtaufbau des Bots besprochen und es wurden Verbesserungsvorschläge eingebracht.
Bericht von Elektronik vom November
Die Elektronik hat im November die letzten fehlenden Teile auf die neuen Mainboards gelötet. Die Mainboards sind zuständig, dass die Kommunikation zwischen den einzenen Platinen funktioniert. Ebenfalls hat die Elektronik neue Teile für die weiteren Platinen, welche das WM-Team für die Roboter brauchen werden.
Im November hat die Elektronik gelernt, wo sie im Eagle (das Programm, in welchem wir die Platinen designen und bestücken) nachschauen kann, und welche Teile an die verschiedenen Stellen auf den Platinen hingehören.
Bericht von Software vom November
Ein neuer Monat ist um, im November ist beim Software Team wieder einiges dazugekommen. Das Software Team hat einen kompletten Hardware Test durchgeführt und mit diesem getestet was funktioniert. Dabei hat die Software festgestellt, dass die Positionsfindung und die Ballsensoren gut funktionieren, doch die Ballfindung noch perfektioniert werden kann. Beim Review, welches auch diesen Monat stattfand, ist der Roboter schon relativ gut übers Spielfeld gefahren. Wie immer gibt es auch noch Sachen zu verbessern. Nun macht das Software Team einen Monat Pause, doch nachher geht es weiter, mit den Liniensensoren und dem Lidar, also einer noch besseren Positionsfindung.
Im Monat Oktober hat das WM-Team viel Arbeit geleistet und konnte schon viele Aufgaben erledigen, die bis zum ersten Review erledigt werden müssen.
Mechanik
In diesem Monat hat die Mechanik den Robo geplant und CAD gezeichnet.
Bei der Planung des Bots hat die Mechanik mit der Betrachtung der Bots aus den vorherigen Jahren begonnen, hat diese nach Stärken und Schwächen analysiert und hat daraus Verbesserungsmöglichkeiten geschlossen. Erste Absprachen mit der Elektronik betreffend Raumbedarf der Boards und Sensoren haben stattgefunden, sodass die Mechanik erste Pläne und Skizzen des Bots zeichnen konnte.
Detaillierter wurde der Antrieb geplant. Die Motoren wurden ausgewählt, getestet und analysiert. Dabei hat sich die Mechanik auch mit den Getrieben, deren Übersetzungen und deren Auswirkungen auf die Radiuswahl der Räder auseinandergesetzt.
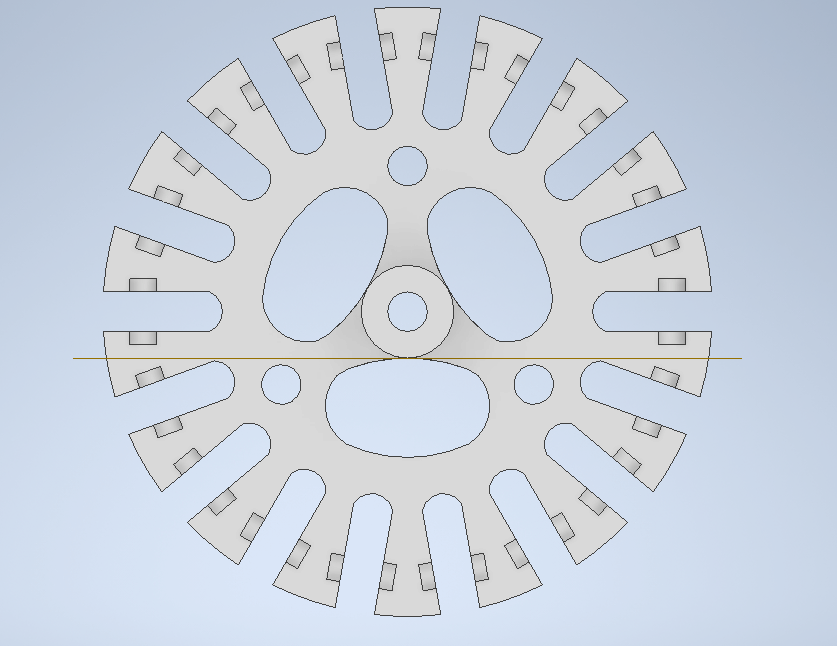
Zudem hat die Mechanik die Omniwheels gezeichnet. Dabei hat sie zuerst die bestehenden, alten Omniwheels gezeichnet und hat dazu Verbesserungsmöglichkeiten gefunden und miteingezeichnet.
CAD der Omniwheels in Entstehung
Elektronik
Ich habe mich intensiv mit den Themen und Aufgaben der Elektronik beschäftigt. Ich habe viel mit der Hilfe des Wikis und vor Allem von den älteren Robotikmitgliedern gelernt.
Im Oktober habe ich den alten WM-Roboter wieder zum Laufen gebracht und allfällige Reparaturen gemacht. Ich habe ebenfalls 5 neue Motorboards bestückt und danach gelötet.
Software
Im Oktober hat das Software Team, welches aus Matthaeus und Anna-Chiara besteht, viel neues dazu gelernt. Wir haben uns mit dem Code auseinandergesetzt und versucht kleinere Sachen zu programmieren. Wir haben viele Fragen gestellt und uns im Wiki informiert. Ausserdem haben wir den alten Roboter fahren lassen und festgestellt was man noch verbessern muss. Es gab zum Teil Probleme beim Wechseln von Programmen, dies lag an den Atmel Ice weshalb man nun neue bestellt hat. Des Weiteren wurden die Motoren getestet und festgestellt, dass alle einwandfrei funktionstüchtig sind. In den nächsten Tagen wartet viel Arbeit auf uns, wir werden noch die Ballsensoren testen und die Liniensensoren debuggen.
Das Schuljahr ist offiziell bereits wieder einen Monat alt und wir als Helveticrobot Team sind letzten Samstag mit viel Elan in ein neues Wettbewerbsjahr gestartet.
Am Treffen wurde das neue WM-Team ins Thema eingeführt. Einige ehemalige Mitglieder haben Anna-Chiara, Annina, Jon und Matthaeus einen ersten Überblick verschafft. Danach wurden Probleme der letzten Jahre besprochen und Besonderheiten in den Teilbereichen Elektronik, Mechanik und Programmierung erklärt.
Die Lage bleibt Covid-19-bedingt ungewiss. Das aktuelle WM-Team ist trotzdem hoch motiviert und wird alles daran setzen im April 2021 an den Austrian Open in Weiz (AT) und hoffentlich danach in Bordeaux (FR) mit konkurrenzfähigen Soccer-Robotern anzutreten.
Der Verein Helveticrobot hat seit Samstag, 14. März 2020 bis auf weiteres jegliche Vereinsaktivität eingestellt. Wir stellen nun heute am 16. März 2020 fest, dass unser Hauptwettbewerb dieses Jahr, der RoboCup Junior in Bordeaux (Weltmeisterschaft) noch nicht abgesagt wurde. Da die nationalen Qualifikationswettbewerbe rund um die Schweiz jedoch abgesagt wurden, hat der Vorstand entschieden, dieses Jahr nicht am RoboCup Junior teilzunehmen.
Wir bedauern diesen Entscheid zutiefst, da der Verein seit seiner Gründung vor über 10 Jahren jedes Jahr an den Weltmeisterschaften teilnehmen konnte. Die Vereinsarbeit wird nun ebenfalls komplett eingestellt. Im Sommer werden wir mit neuen Teams in ein neues Weltmeisterjahr starten.
Im letzten Monat hat sich die Elektronik, die auch für die Medien zuständig ist, hauptsächlich damit beschäftigt, alle Passwörter für die Medien zusammenzutragen. Zudem bemühte sie sich, in ihrem Fachgebiet so viel, wie möglich zu lernen.
Sie hat ausserdem einige neue Mainboards gelötet. Sie steht immernoch mit Ehemaligen in Kontakt, da sie noch sehr viel lernen muss. Am nächsten Wochenende steht zudem ein Treffen an, wo sie die möglichkeit hat, sich weiter zu bilden.
Im Februar 2020 hat sich die Software hauptsächlich mit den Ballsensoren des Roboters und dessen Koordinierung auf dem Spielfeld beschäftigt.
Die Software hat den Monat damit begonnen, im Programm der Ballsensoren den Ursprung der Ungleichheiten von Master und Slave-boards zu suchen, und wurde fündig. Sie arbeitet nun auch daran, die Probleme des Programms der Ballsensoren anhand der Anpassung von Werten zu beseitigen.
Eine Schwierigkeit war, dass die Änderung der Werte im ganzen Programm auf Probleme stiess.
Im nächsten Monat wird weiter daran gearbeitet.
Noch dazu versucht die Software, sich nicht nur beim Ballsensorenprogramm, sondern auch im Allgemeinen einen Überblick zu verschaffen. Dabei helfen ein Arduino Kit und das dazugehörige Buch.
Saphira Sauerer hat sich überlegt, was für den Bot überhaupt wichtig ist und dies aufgeschrieben. Ausserdem hat sie sich überlegt wie man zum Ergebnis kommen könnte. Zum Beispiel hat sie mit dem Dribbler experimentiert und verschiedene Methoden ausprobiert, um den Dribbler so hinzubekommen, dass Haft zwischen dem Ball und dem Dribbler vorhanden ist aber auch nicht zu viel Haft. Mit Silikonspray hat dies überhaupt nicht geklappt, weshalb die bewährte Latexmilch-Malerroller-Methode wieder ausgeführt wird. Ausserdem hat sie schon zwei 1mm dicke Karbonplatten bestellt, weil wir versuchen wollen, dieses Jahr keine Sandwichplatten zu verwenden, da diese sehr schnell spröde und instabil werden können. Durch das Nicht-Verwenden der Sandwichplatten ist aber die Frage aufgekommen, wie man 1mm Platten aneinanderschrauben kann. Metall-Winkel wären hierfür zu gross und schwer. Plastikwinkel sind meist zu gross und klobig. Holzwinkel sind meistens nicht sehr resistent und gehen schnell kaputt. Somit bleiben noch 2 Optionen von Winkeln, die man selber herstellen würde: 3D-Drucker-Winkel oder Schrumpffolienwinkel. Die Schrumpffolie wurde dazu schon gekauft und anfangs März wird zuerst diese Methode getestet. Falls diese Methode sich als nicht gut genug erweist, werden Prototypen 3D ausgedruckt.
Die Elektronik hat sich das erste Mal mit den Themen und Aufgaben der Elektronik beschäftigt. Sie hat mit der Hilfe des Wikis und älteren Robotikmitgliedern einiges lernen dürfen. Während des Februars hat sie mit Hilfe vom WM-Team die Wärmesensoren getestet.
Am 1. März durfte ich lernen, was die verschiedenen Sensoren und Boards machen und wie sie funktionieren. Ich habe meine erste Platine im Eagle gezeichnet und sie sollte in der Theorie funktionieren.
Schwierigkeiten gab es am Anfang, da die Elektronik noch nicht viel Ahnung von der ganzen Elektronik an einem Roboter gehabt hat. Als Lösung hat sie ehemalige Elektroniker aus dem Robotikteam um Hilfe gebeten.