Das grosse Event im Monat März war zweifelsohne das zweite und letzte Review vor den Austrian Open im April. Dieses fand am 10. März statt. Um alle Milestones und Ziele zu erreichen, musste das Challenge-Team einige Stunden Arbeit leisten.
Die Mechanik hat die Motoren ausgetauscht und das Ballaufnahmesystem eingebaut. Ersteres musste getan werden, weil es mit den bisherigen Motoren einige Probleme gab. Nun schmücken kleinere Motoren, welche einwandfrei funktionieren, den Roboter. Diese sind leichter und haben ein kleineres Drehmoment, sind jedoch trotzdem genug stark um den Roboter anzutreiben. Der Einbau der Motoren und des Ballaufnahmesystems verlief ohne grössere Probleme. Damit die Elektronik mehr Platz zur Verfügung hat und die Verkabelung der Boards sich einfacher gestalten, wurde ausserdem der Abstand zwischen den beiden Decks vergrössert. Auf dem oberen Deck finden nun 4-5 Bälle Platz, was für den Wettbewerb vollkommen ausreicht.
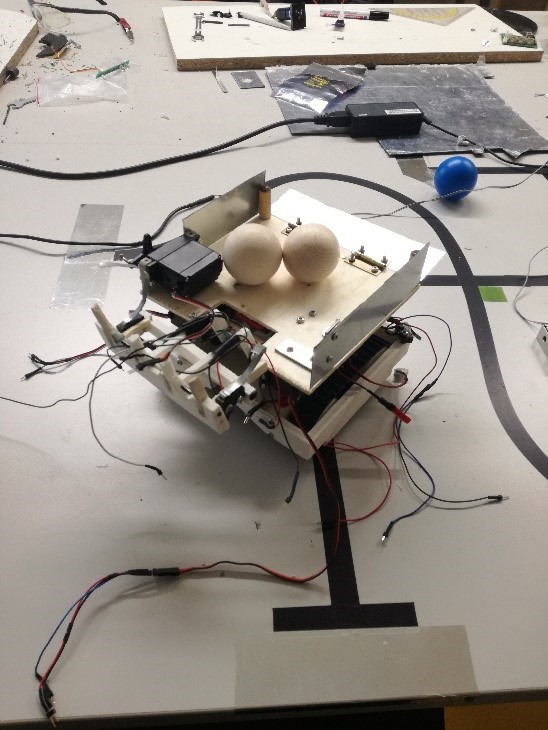
Challenge-Roboter von Oben: zwei Bälle auf dem oberen Deck

Challenge-Roboter von der Seite: Die Elektronik (Boards) befindet sich zwischen den beiden Decks
Die Software hat die neue Ansteuerung über das Motorboard in den Code implementiert. Diese neue Ansteuerung der Motoren per SPI und mit neuen Motorboards wurde von einem der Passivmitglieder erstellt. Damit können die Motoren viel genauer angesteuert werden. Auch die Position, in welcher sich ein Motor befindet, kann ausgelesen werden. Ausserdem kann der Roboter nun um einiges langsamer fahren, da das Motorboard die Geschwindigkeit selbst korrigiert. Zusätzlich wurden
einige kleine Änderungen am Line Follower vorgenommen, die Geschwindigkeit des Programms wurde wesentlich erhöht und die Anzahl write-Befehle an das Motorboard stark reduziert. Durch die Implementation der Ansteuerung der Servos kann der Roboter nun seinen Arm nach oben und unten bewegen.
Die Elektronik hat in diesem Monat viel erreicht. Die Motorboards wurden durch neue getauscht. Sie besitzen nun eigene Prozessoren. Dies ermöglicht die Verarbeitung der Daten der Motorenrotation. Mit diesen kann nun im Programm gearbeitet werden. In Zusammenarbeit mit der Mechanik wurde ausserdem ein neues Lichtboard an den Roboter angebracht. So funktionieren die Sensoren besser und der silberfarbene Streifen auf dem Spielfeld kann erkannt werden. Nebenbei wurde auch noch das Verkabelungssystem, mit welchem die einzelnen elektronischen Bauteile miteinander verbunden sind, vereinfacht. Die Arbeit am Roboter geht so deutlich leichter von der Hand.
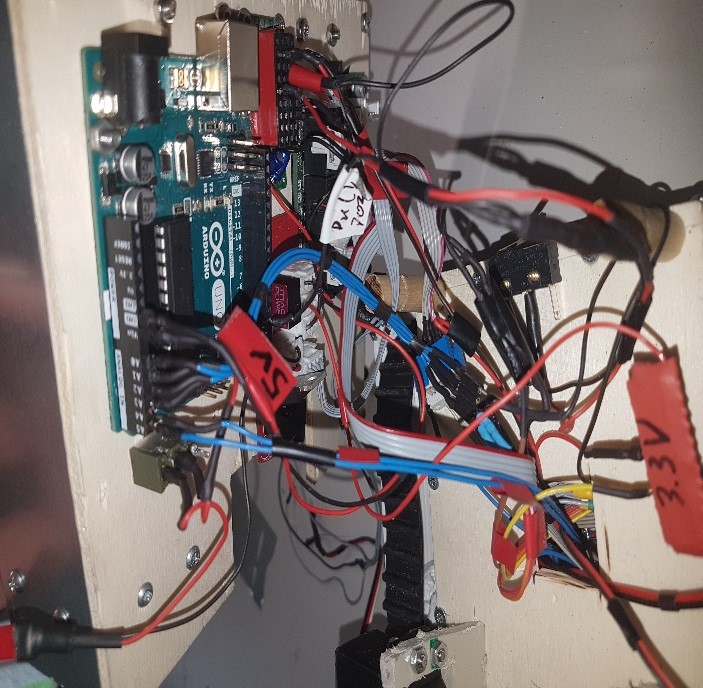
Verkabelungssystem des Challenge-Roboters

neues Motorboard des Challenge-Roboters