WM-Team
Mechanik
In diesem Monat hat die Mechanik viel am Roboter gebaut. Anfang Monat hat sie die Verbindungen, von denen letzten Monat die Rede war, getestet und verbessert. Im Detail wurden die Verbindungen etwas dicker und somit stabiler gemacht und die Schraubenlöcher wurden besser an die Schrauben angepasst. Nun hat sie von diesen Verbindungen nochmals ein paar drucken lassen, um mit dem Bau des Roboters zu beginnen. Zudem hat die Mechanik gelernt, wie man Gewinde in Carbonsandwhichplatten macht.
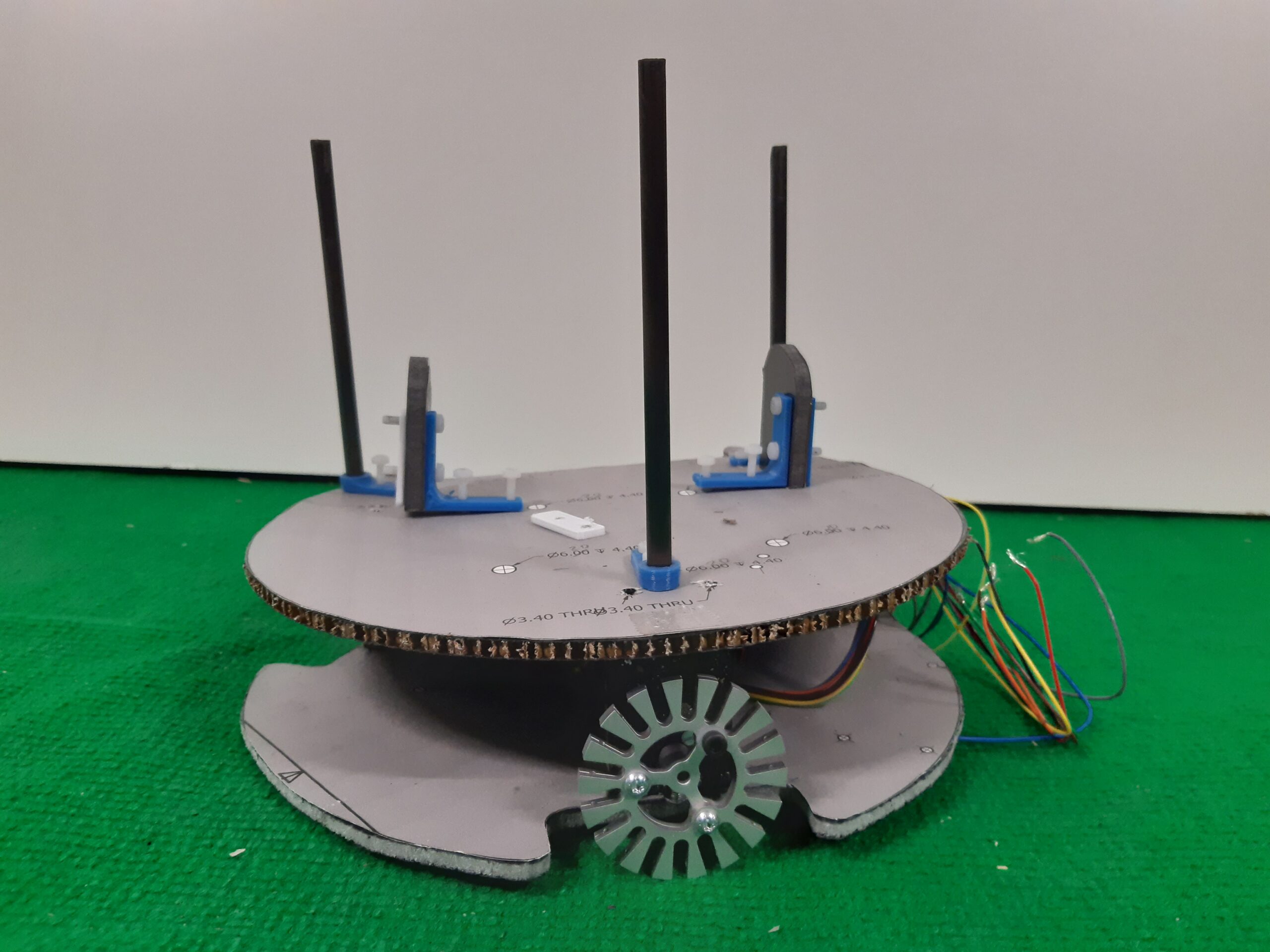
Mit diesem Wissen und Material hat sie sich an das Zusammenbauen des Robos gemacht. Mittlerweile sind die Bodenplatte mit Motoren und Omniwheels, die Mittelplatte mit Dribbelhalterung und das Dach montiert. Die Schwierigkeit lag darin, die Löcher für die Schrauben oder Carbonstäbe präzise genug zu Bohren. Oftmals musste die Mechanik dann die Löcher nochmals neu bohren. Mit der Zeit hat die Mechanik ein System gefunden wie man die Löcher präziser Bohren kann.
Elektronik
Die Elektronik hat sich im Mai mit den Ballsensorplatinen beschäftigt. Die Ballsensorplatinen sind für die Ballerkennung und Ballortung zuständig. Die Elektronik hat sich mit eben diesen einzelnen Teilen auf den Platinen, welche auf die Platinen gelötet werden, beschäftigt.
Software
Im Monat Mai hat das Softwareteam an den Liniensensoren gearbeitet. Dies ist Momentan ein sehr Zentrales und nicht so einfaches Problem. Denn die Sensoren an sich funktionieren doch das Programm noch nicht so wirklich oder nur unter besonderen Umständen. Wir sind daran herauszufinden warum dies so ist. Ausserdem haben wir uns noch kurz mit dem PDI Regler beschäftigt. Im nächsten Monat werden, wir uns mit dem nun fast fertigen neuen Roboter beschäftigen. Wir werden schauen wie die Programme funktionieren und was man anpassen oder eventuell ändern muss. Ausserdem werden wir uns auf den bald schon bevorstehenden Wettbewerb vorbereiten, der online stattfinden wird.
Challenge-Team
Diesen Monat lag unser Fokus auf den Motoren. Zum einen wollten wir diese an unseren Prototypen befestigen, zum anderen aber auch mit unserem Arduino steuern können.
Wie beim letzten Review besprochen haben wir also eine Lösung mit Übersetzung am einen Motor angepeilt, so dass wir die Motoren nebeneinander platzieren können.
Während David versucht hat, eine stabile Konstruktion am Prototypen zu errichten, um die Motoren zu befestigen, haben Julia und Lars versucht, die Motoren mit einem Arduino zu steuern.
Leider sind wir diesen Monat nicht ganz so weit gekommen, wie ursprünglich geplant. Die von David am Prototyp befestigten Motoren hielten nicht fest genug, so dass wir sie wieder entfernt haben und dies erneut versuchen müssen. Ebenso war es uns bis jetzt noch nicht möglich, die Motoren mit unserem Arduino zu kontrollieren.
Um diese Probleme zu lösen haben wir in der ersten Juni-Woche einen Workshop mit Vereinsälteren, bei welchem wir uns unsere Situation genauer anschauen werden.