WM-Team
Nach einem erfolgreichen Kick-Off Meeting am 8. September konnte die Arbeit für das nächste Jahr beginnen. Am Kick-Off Meeting wurden die verschiedenen Ziele festgesetzt und auch schon ein grober Jahresplan erstellt und Veränderungen an den neuen Robotern geplant.
Zu den Zielen für die Roboter gehören unter anderem, dass sie wieder zusammen spielen können, zuverlässiger sind als bisher und nur wenige Gegentore zulassen.
Die geplanten Veränderungen der Roboter sind vielseitig und in allen Bereichen des Roboters bemerkbar. Wie die Upgrades verlaufen wird monatlich auf diesem Blog aufgeschaltet werden.
Im Software Bereich sind schon verschiedene Projekte am laufen. So konnte in diesem Monat das neue Kompassmodel,CMPS12, für den Soccerbot getestet werden. Dieser ermöglichte sehr stabile und schnelle Werte zu erhalten und war aufgrund seiner Ähnlichkeit zu dem Vorgängermodell, CMPS11, schnell einsatzbereit. Durch die Verbesserung der Werte erhoffen wir uns eine breitere Einsetzbarkeit im Navigationsprogramm und stabileres Fahrverhalten.
Wegen Problemen im letzten Jahr mit den Ultraschall Distanzsensoren wurden Alternativen dafür gesucht. Zu überwindende Hürden waren, dass andere Ultraschallsensoren in einem zu grossen Bereich messen, weshalb unbestimmt ist zu was die gemessene Distanz korreliert und dass Laserdistanzsensoren oft Licht im Infrarot Bereich aussenden. Da der Ball ebenfalls im Infrarot Bereich Licht emittiert können diese Sensoren nicht eingesetzt werden, da sie gegnerische Teams behindern. Infrarot Distanzsensoren fallen natürlich für die gleichen Gründe ebenfalls aus dem Rennen. Nach längerer Suche fanden wir einen Laserdistanzsensor, welcher auf Wellenlängen aktiv ist, die für die verwendeten Sensoren um den Ball zu finden nicht sichtbar sind.
Um Probleme mit der Linienerkennung der letzten WM zu beheben, wurde an einem Programm zur selbständigen Kalibration der Liniensensoren gearbeitet. Ein erster Lösungsansatz wurde getestet, scheiterte jedoch daran, dass der Microcontroller nicht über genügend Speicherplatz verfügt. Deshalb wird nun an einer schlankeren Methode gearbeitet.
Die Elektronik arbeitete an einem vollständigen Satz aller Elektronikbauteile welche für einen Soccerbot gebraucht werden fertiggestellt und repariert. Diese wurden für die zu Ende des Monats vollendete Testplattform benötigt. Des Weiteren wurden DCDC Regler bestellt, welche die Spannung erhöhen. Dies wird für den Kicker für mehr Kraft benötigt. Allerdings gab es bei der Lieferung dieser Bauteile Komplikationen weshalb sie noch nicht eingebaut werden konnten. Zudem entstanden einige Schwierigkeiten beim Testen und Funktionieren der Mainboards. Ein neu gelötetes Mainboard funktionierte anfangs nicht einwandfrei. Nachdem allerdings ein Bauteil, welches defekt war, ausgetauscht wurde, konnte das Mainboard einwandfrei genutzt werden.
Die Mechanik hatte ebenfalls verschiedene Baustellen offen. Das CAD des neuen Dribblers wurde fertig gezeichnet und eine Testplattform mit neuen Omniwheels gebaut. Der diesjährige Dribbler soll höhenverstellbar sein. Dies erschwert den Bau des Dribblers erheblich. Die Drehachse befindet sich beim Motor. Die Dribblerrolle wird mit einem elastischen Band nach unten gedrückt. Durch den beweglichen Dribbler wird verhindert, dass der Roboter auf verschiedenen Spielfeldern auf den Ball dribbelt oder diesen nicht zu fassen bekommt.
Die einzelnen Teile wurden mit 3D-Drucker ausgedruckt. Bei der Mittelplatte der Testplattform fehlten jedoch Bohrungen für die Platinen im CAD. Aus diesem Grund wurde der Einbau der Elektronik sehr aufwendig. Für die weiteren CADs ist dies ein zu beachtender Punkt.
Die Subwheels der Omniwheels erstellten wir aus PLA und elastischem Filament. Nun werden wir testen, welche sich bewähren und welche endgültig verwendet werden.
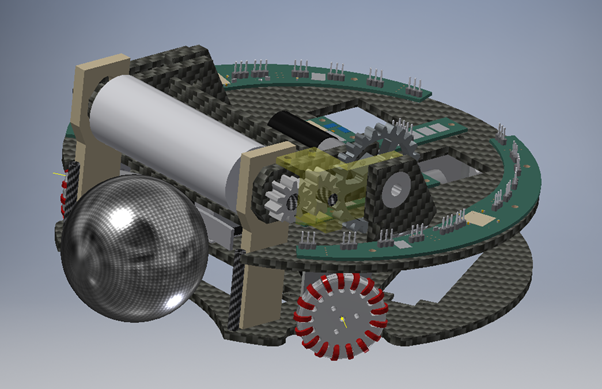
CAD der unteren Hälfte des neuen Roboters mit dem neuen, dynamisch verstellbaren Dribbler
Neue Mitglieder, neue Juniors
Auch in diesem Jahr müssen wieder Lücken von ehemaligen Mitgliedern, welche die Schule mit Matura verliessen, geschlossen werden. Zu diesem Zweck wurde wie immer ein kleiner Infoanlass veranstaltet und wir durften vier weibliche Interessenten begrüssen.
Die neuen Mitglieder werden nun einen Roboter für die Robolympics in Rapperswil vorbereiten und dann definitiv entscheiden ob sie Robotik weiterhin als Hobby verfolgen möchten.
Um die Grundlage für die Robolympics zu schaffen wurden sie an einem Montag Nachmittag in das Programm Brics Comand eingeführt und konnten erstmals ihre eigenen Roboter bauen und in NXC programmieren.