Software
Den I2C Fehler konnten wir erfolgreich beheben. Der Prozessor der Linienerkennungsboards und der Ballsensorenboards ist der Selbe und durch kleine Anpassungen funktionierte der Code der Linienerkennung auch auf den Ballsensorenboards. Überraschenderweise funktionierte nun die Kommunikation ausgezeichnet, obwohl der lowlevel Code zwischen den beiden Projekten identisch ist und bei den Tests kein highlevel Code am „laufen“ war. Somit vermuteten wir, dass es wahrscheinlich einen sehr merkwürdigen Bug hat, für welchen wir vielleicht sogar nichts können, da Bugs bei Atmelstudio keine Seltenheit sind. Deshalb beschlossen wir das ganze Projekt nochmals neu zu erstellen, dabei übernahmen wir aber die meisten alten Codestücke. Nachdem wir das Projekt fertig erstellt hatten, funktionierte es Problemlos. Leider funktioniert die Ballerkennung immer noch nicht, jedoch können wir nun viel einfacher herausfinden wo das Problem liegt.
Bei der Positionserkennung stimmten die gemessenen und die gefahrenen Distanzen nicht überein. Durch eine Anpassung mit ein wenig ausprobieren stimmen sie schon viel besser überein. Zudem gab es auch noch einen kleinen Fehler, bei dem die gefahrenen Distanzen nicht richtig in das Koordinatensystem eingerechnet wurden. Dieser trat aber nur dann auf wenn sich der Roboter nicht in Richtung gegnerisches Goal schaute. Da wir bei den meisten bisherigen Tests den Roboter immer nach dem gegnerischen Goal ausgerichtet haben, ist dies uns bisher nicht aufgefallen.
Elektronik
Bei den Ballsensor Slaves habe ich die Grössen angepasst, dass sie in die neue Anordnung der Platinen passen ohne dass es einen toten Winkel gibt. Ich habe sie um etwa 1 cm länger gemacht und die letzte Photodiode verschoben. So kann der Ball auch erkannt werden wenn er hinter dem Roboter ist. Die Ballsensor- und Mainboards habe ich bestellt, sie kommen am Dienstag an. Die Bauteile habe ich auch bestellt und bereits erhalten. Ausserdem habe ich begonnen weitere Liniensensor- und Motorboards zu bestücken, um Ersatzboards zu haben.
Mechanik
Im Monat Februar stand vor allem der 24h-Wettbewerb im Mittelpunkt. Die letzten Vorbereitungen wurden getroffen und der Wettbewerb schlussendlich dann auch durchgeführt. An einigen Spielfeldern mussten wir zwar im letzten Moment noch eine Lösung für ein spielbezügliches Element finden, im Grossen und Ganzen war der Wettbewerb an sich aber wieder eine tolle Erfahrung, auch wenn wir dieses Jahr deutlich weniger teilnehmende Teams hatten.
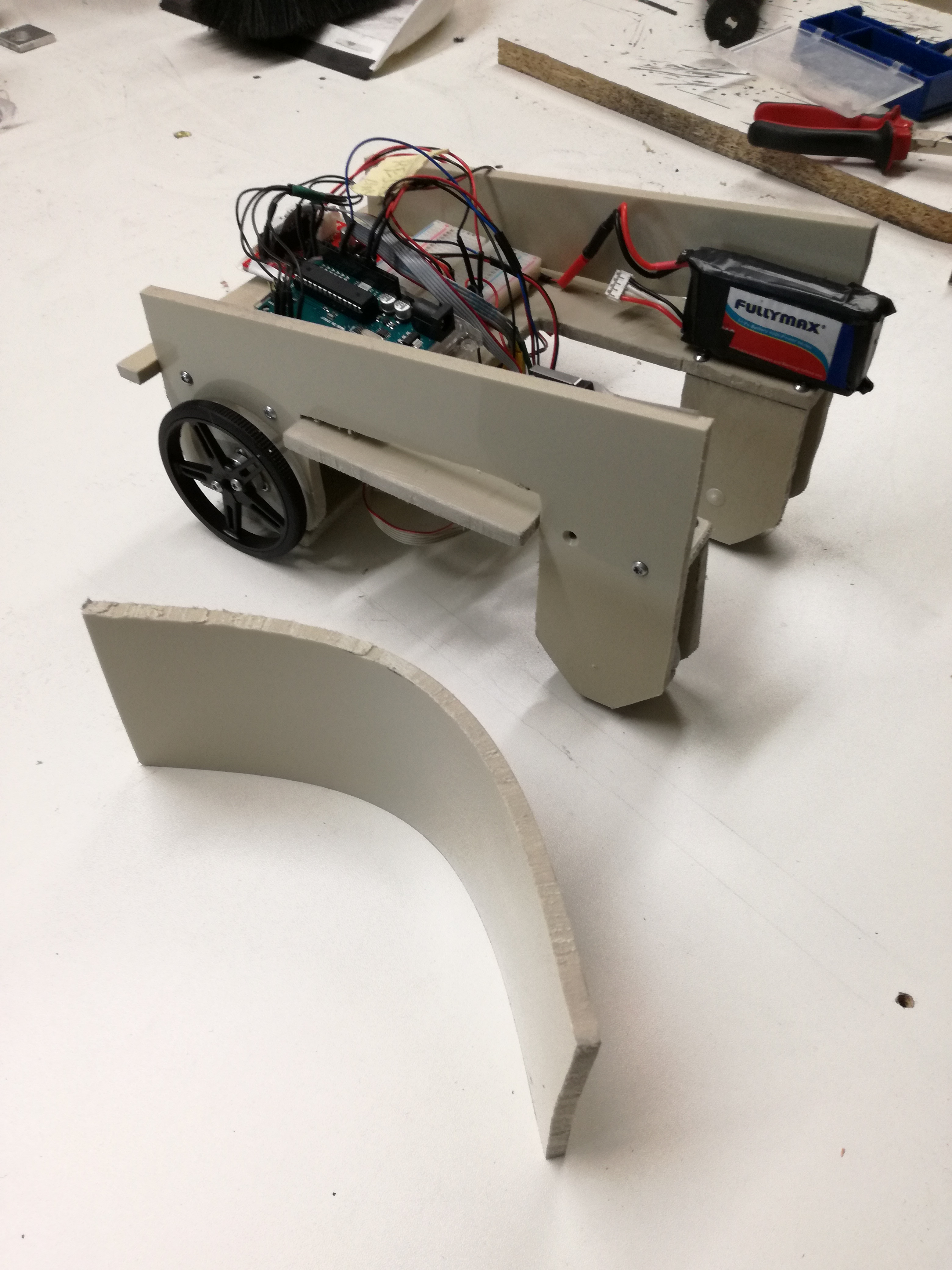
Ein anderer Punkt auf der Liste der Mechanik war die Fertigstellung des zweiten Roboters. Dieses Ziel habe ich beinahe erreicht. Die Teile habe ich zwar alle ausgeschnitten und die Löcher sind auch alle vorgebohrt worden, jedoch musste ich noch an einigen den Kleber für bessere Gewinde anbringen und trocknen lassen. Ich konnte den zweiten Roboter so noch nicht zusammenbauen. Ausserdem habe ich mit der Suche nach Kunststoffschrauben begonnen, habe auch schon welche gefunden, mit denen ich aber noch nicht hundertprozentig zufrieden bin. Deshalb werde ich meine Suche fortsetzen und hoffentlich bald fündig werden. Vielleicht finde ich ja welche im Bossard-Katalog.
Ich bin auf jeden Fall zufrieden mit dem, was ich im Monat Februar alles geleistet habe, und werde im März den zweiten Roboter fertigstellen, beginnen Ersatzteile auszuschneiden und langsam auch mal an den Dribblern arbeiten.