
Mechanik: Dem Roboter fehlt nur noch der Feinschliff
Im März konnten wir die Platte für die Rescuekids fertigstellen. An den Rescuekids selber sind wir jedoch noch am Feilen, um die Grösse noch zu optimieren, dass diese gut durch das Loch in der Platte fallen können. Neben dieser Arbeit haben wir noch ein PVC-Teil angefertigt, an welchem wir die sechs Infrarotsensoren in den Winkeln befestigt haben, die bei den Tests am Besten abgeschnitten haben. Dieses Teil dient zusätzlich als praktischer Haltegriff um den Roboter problemlos hochzuheben. Somit fehlen jetzt nur noch die Touchsensoren und der Lichtsensor.
Da jetzt trotzdem entschieden wurde, dass wir die Faulhabermotoren verwenden können, welche jetzt am aktuellen Roboter sind, können wir den ursprünglichen Prototypen nur noch verbessern und müssen nicht noch einen neuen bauen.
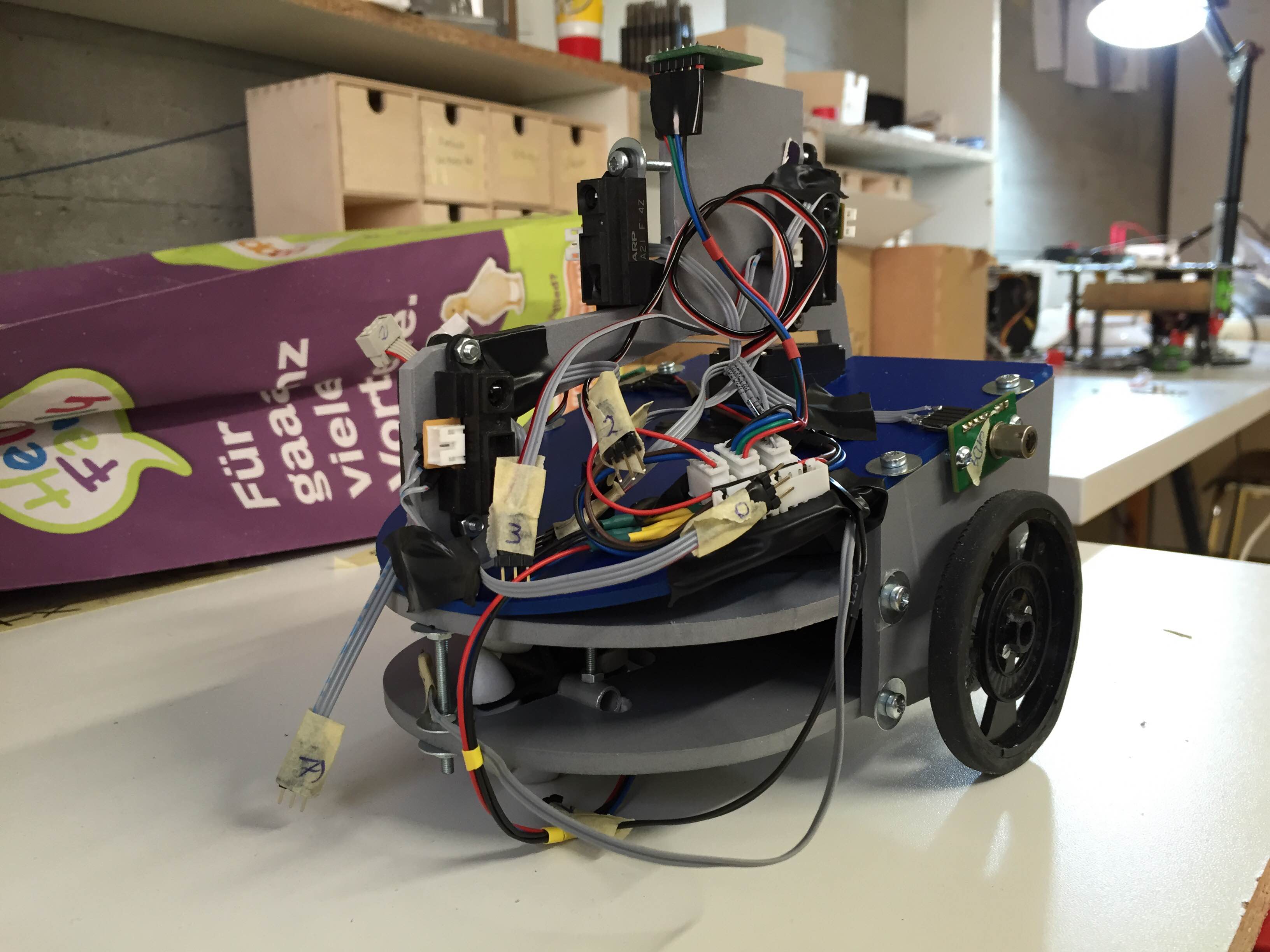
Der Rescue A Wettbewerbsroboter.
Software und Elektronik: Die Sensoren funktionieren ohne Probleme
Wir haben viele unserer Sensoren kalibriert und efoglreich in unsere Algorithmen eingebaut.
Den Infrarotsensoren haben wir den letzen Schliff gegeben und sie sind jetzt auf 2mm genau, dementsprechend genau ist jetzt auch die Wandfolge. Der Servomotor, der die Rescuekits auswirft ist jetzt auch voll funktionsfähig, wie auch der Touchsensor der das Feedback gibt, ob das Kit bereits ausgeworfen wurde. Auch die Wärmesensoren sind kalibriert und voll funktionsfähig. Wir haben auch einen Kompass aquiriert und benutzen ihn jetzt um herauszufinden, ob wir auf der Rampe sind oder nicht. Jetzt geht es in den Endspurt, um die genauen Verhältnisse zwischen den Sensorrückgabewerten und der Motorenstärke zu finden.